图1 基于综合资源匹配模型的研发伙伴识别与选择
摘 要:随着工业4.0时代技术复杂性的不断提高,企业合作研发需求增大,资源匹配视角下的研发合作伙伴识别与选择受到关注。针对现有研究缺乏系统的评价模型,并且资源匹配情况主要依据专家主观判断的问题,设计出由互补性、相似性与完整性指标构成的SIC-Dimension三维综合评价模型。该模型不仅可以提高研发合作伙伴识别的有效性,还能通过资源定性匹配与定量匹配相结合,降低伙伴选择过程的复杂性和主观性。最后,以工业机器人相关技术为例,进行了评价模型实证分析,进一步验证了多指标综合评价的价值。
关键词:技术资源;研发合作;伙伴选择;匹配关系
随着工业“4.0”时代的到来,技术复杂性不断增加、技术更新周期不断缩短,企业仅凭内部资源和独立研发实现技术突破愈加困难,因而加强外部研发合作成为当下实现技术创新以及占据有利竞争地位的必然选择。
R&D 合作的成功与否取决于多种因素,如合作伙伴能力、合作组织开放性、合作基础和伙伴间资源匹配性等,其中资源匹配是获得超额收益、促进研发合作以及形成协同效应的关键[1]。因此,本文从资源匹配视角研究研发合作伙伴的识别与选择问题。由于技术资源是企业改进现有技术和产品的资产和能力,难以直接获取,因而技术资源匹配是本文研究的重点。
国内外关于研发合作伙伴的识别与选择的研究成果较为丰富,主要归纳为两个方面:①个体能力识别视角下的研发合作研究。例如, Geum[2] 基于专利指标,Jeon等[3],汪雪峰等[4]利用文本数据挖掘识别研发合作伙伴,Hagedoorn[5]基于统计方法识别研发合作伙伴。这些研究都充分考虑到合作伙伴的个体能力,但缺乏对 R&D 伙伴间资源匹配状况的进一步检验;②资源匹配视角下的研发合作研究。该视角在评估研发合作伙伴个体能力的基础上,对伙伴间资源匹配状况进行了检验。例如,纪慧生[6]对伙伴间的知识匹配进行了分析, Mohr和Spekman[7]对合作过程中的承诺、协调、沟通等因素的匹配展开了研究,彭展声[8]从技术资源、非技术资源、信任沟通等6个方面研究 R&D 伙伴间的匹配性。在以上各种资源匹配中,技术资源是企业改进现有技术、产品的资产和能力,难以直接获取。因此,技术资源匹配研究显得尤为重要。
针对技术资源匹配视角下的研发合作,Cascini等[9]指出,互补型匹配模式可以判断研发合作的价值;张晓黎等[10]研究了技术相似关系对技术创新绩效的影响;Chen等[11]论证了互补且相似的资源可以提高研发合作绩效;Bomi Song[12]等开创性地提出资源完整性指标,并使用资源完整性与相似性两个指标对合作伙伴进行了定量分析。
上述学者分别给出对伙伴识别和选择的不同指标,但只有将这些指标进行综合才更能有效地解决伙伴识别与选择问题。因此,提出综合识别体系显得十分必要。此外,针对资源匹配过程,徐浩等[13] 提出结构方程模型,Wang等[14]提出专利组合分析方法,Byungun等[15]提出形态分析法,然而现有选择方法仍以专家判断为主。尽管专家在伙伴识别与选择中作用很大,但存在主观性带来的问题[16]。为此,本文提出基于客观数据的筛选方法,以降低企业研发合作伙伴选择问题的复杂性和主观性。
针对上述研究综述,本文基于资源匹配视角,构建了包含互补性、相似性和完整性的SIC-Dim三维综合分析模型。该模型可实现互补性指标的量化评价。同时,对其它两个指标进行改善,引入定性与定量相结合的资源匹配综合分析法,以加深对研发合作中技术资源匹配的认知,进而全面客观地评估合作伙伴的技术资源匹配情况。
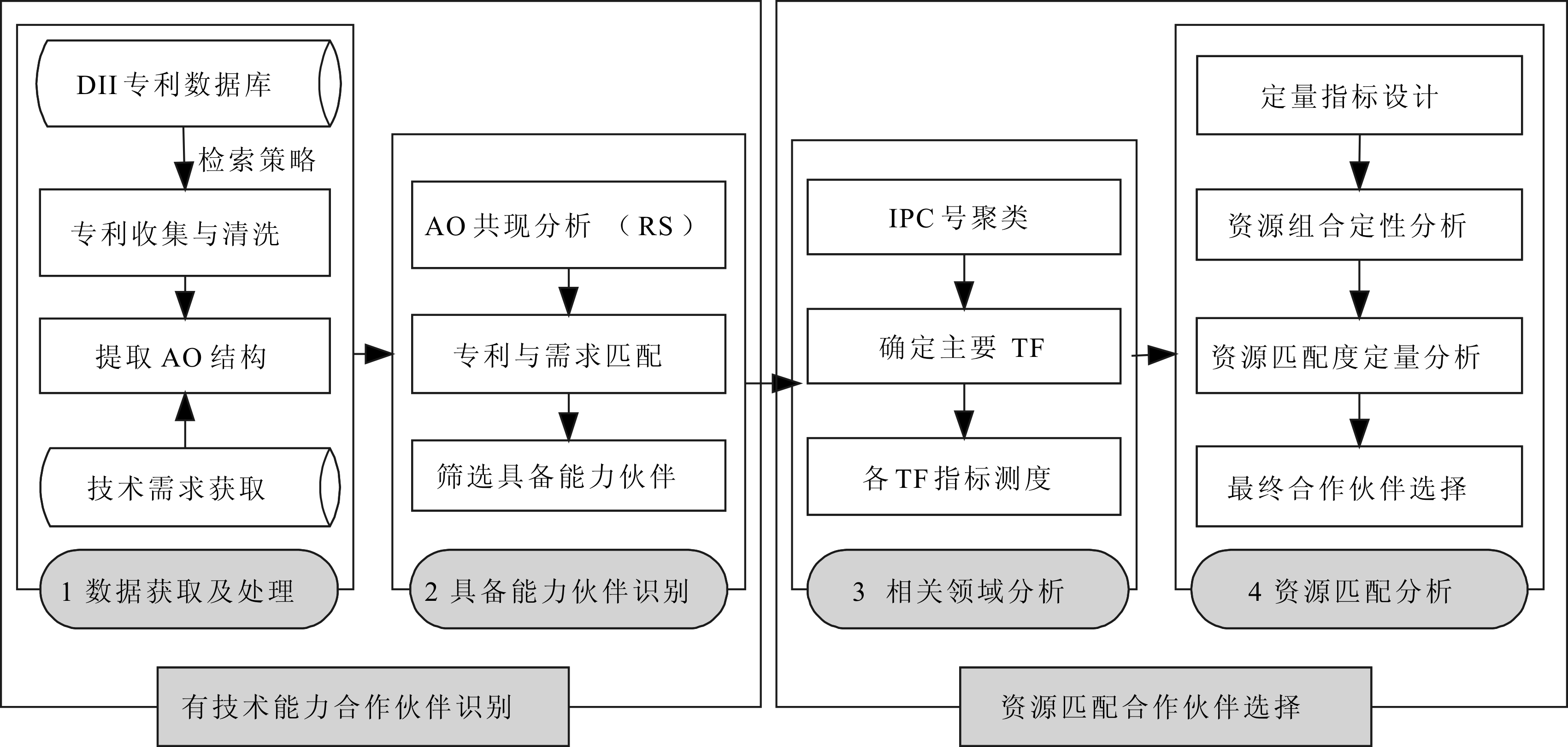
本研究旨在寻找合适的企业研发合作伙伴。由于专利信息对于确定企业研发能力、竞争优势以及企业间技术资源匹配至关重要,本研究使用专利信息作为数据基础,利用文本挖掘方法获取完整的专利真实信息,测度合作伙伴个体能力,并利用SIC-Dim三维分析法对研发伙伴资源匹配状况进行检验,具体步骤如图1所示。
图1 基于综合资源匹配模型的研发伙伴识别与选择
2.1 数据采集和预处理
以德温特、USPTO等专利库为数据源,首先依据文献阅读、专家意见以及技术需求等信息,确定检索表达式,再通过预处理提取进一步分析所需的信息,如专利IPC号、标题、摘要、专利权人等信息。
本研究旨在为企业选择研发合作伙伴。由于企业可能会因为兼并、收购和资产剥离等行为而改变企业名字或者专利权人,所以首先通过清理拼写错误和形式变化对专利权人进行合并统一,剔除个人、高校等专利权人,最终选择机构专利权人及其专利进行分析。
2.2 潜在研发合作伙伴初步识别
技术合作的重要目的在于开发出满足特定需求的新技术或新产品。因此,具备相关技术需求的知识和能力是研发合作伙伴的基本条件。在这一步中,首先通过文本挖掘调查企业持有的相关专利,评估公司基本技术能力,然后选择高潜力的公司作为研发合作伙伴候选人。
首先借助文献查阅、领域专家以及文本挖掘等途径,确定主要的研发技术需求,并表示为AO结构形式,例如:“降低转速”,A结构为“降低”,O结构为“转速”;其次,利用编程对专利摘要、权利要求书等信息进行自然语言处理,初步提取专利摘要文档的AO 结构,对于不完善的提取结果进行进一步人工甄别,以此获取专利信息的主要特征;最后,专利与技术需求的相关性由A、O结构在句子层面的共现频率衡量。专利i与技术需求j的相关性得分(RS)计算公式[21]为:
RSi(j)=fi(Aj,Oj)
其中,Aj和Oj是第j个技术需求中A结构与O结构的成分;fi(Aj)和fi(Oj)是在专利Pi中Aj和Oj的频次;fi(Aj,Oj)表示在句子层面Aj和Oj在专利Pi的共现频次,RSi(j)的取值范围从0到1,0表明专利Pi的摘要中没有同时包含Aj和Oj的句子,1表明专利Pi摘要中Aj和Oj总是在句子中共同出现。
由于AO结构代表了技术句子需要解决的问题,RSi(j)值表示专利Pi的专利文本中技术表达与需求表达的一致性,RSi(j)值越高意味着专利Pi越可能传达第j个技术需求相关的解决方案,Pi的专利权人越可能是解决需求的技术拥有者。因此,总得分高于阈值的专利权人被识别为具备技术能力的研发合作伙伴。
2.3 相关技术领域分析
为了识别出相关核心技术领域,首先选择申请最频繁的专利分类代码作为初始集,然后对初始集中的分类代码进行聚类分析,在专利分析中该方法已被指定用于分析相关核心技术领域[17-18]。由于在某个特定技术领域,经常共同申请专利分类代码往往与该技术的构建和开发具有密切关系,使用专利分类代码的聚类作为技术领域,不仅降低了专利分析的复杂性,而且能反映出核心技术结构。
在确定相关技术领域后,计算每个合作伙伴在各技术领域的价值维度。本研究采用技术份额(TS)和研发重点(RnDE)作为各技术领域的测度指标[19],二者的表达式及含义如表1所示。
2.4 资源匹配评估,最终研发合作伙伴选择
为了评估潜在研发伙伴间的资源匹配情况,首先对初步筛选出的n个潜在研发合作伙伴,采用MATLAB编码检验(2n-1)组合作伙伴的资源匹配状况。本文设计了集资源相似性维度(Similarity-Dim)、资源完整性维度(Integrity -Dim)以及资源互补性维度(Complementary-Dim)于一体的SIC-Dim三维分析法,该分析法框架如图2所示。
表1 TS及RnDE表达式及其含义
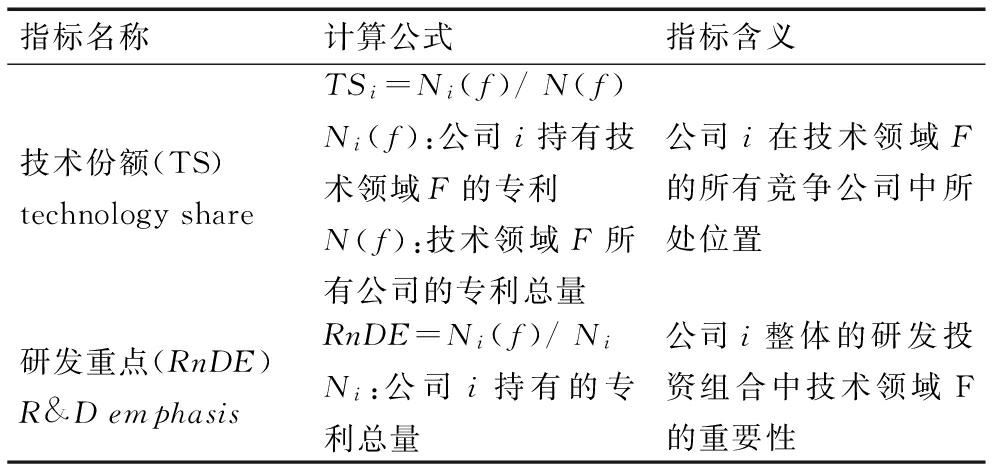
指标名称计算公式指标含义技术份额(TS)technologyshareTSi=Ni(f)/N(f)Ni(f):公司i持有技术领域F的专利N(f):技术领域F所有公司的专利总量公司i在技术领域F的所有竞争公司中所处位置研发重点(RnDE)R&DemphasisRnDE=Ni(f)/NiNi:公司i持有的专利总量公司i整体的研发投资组合中技术领域F的重要性
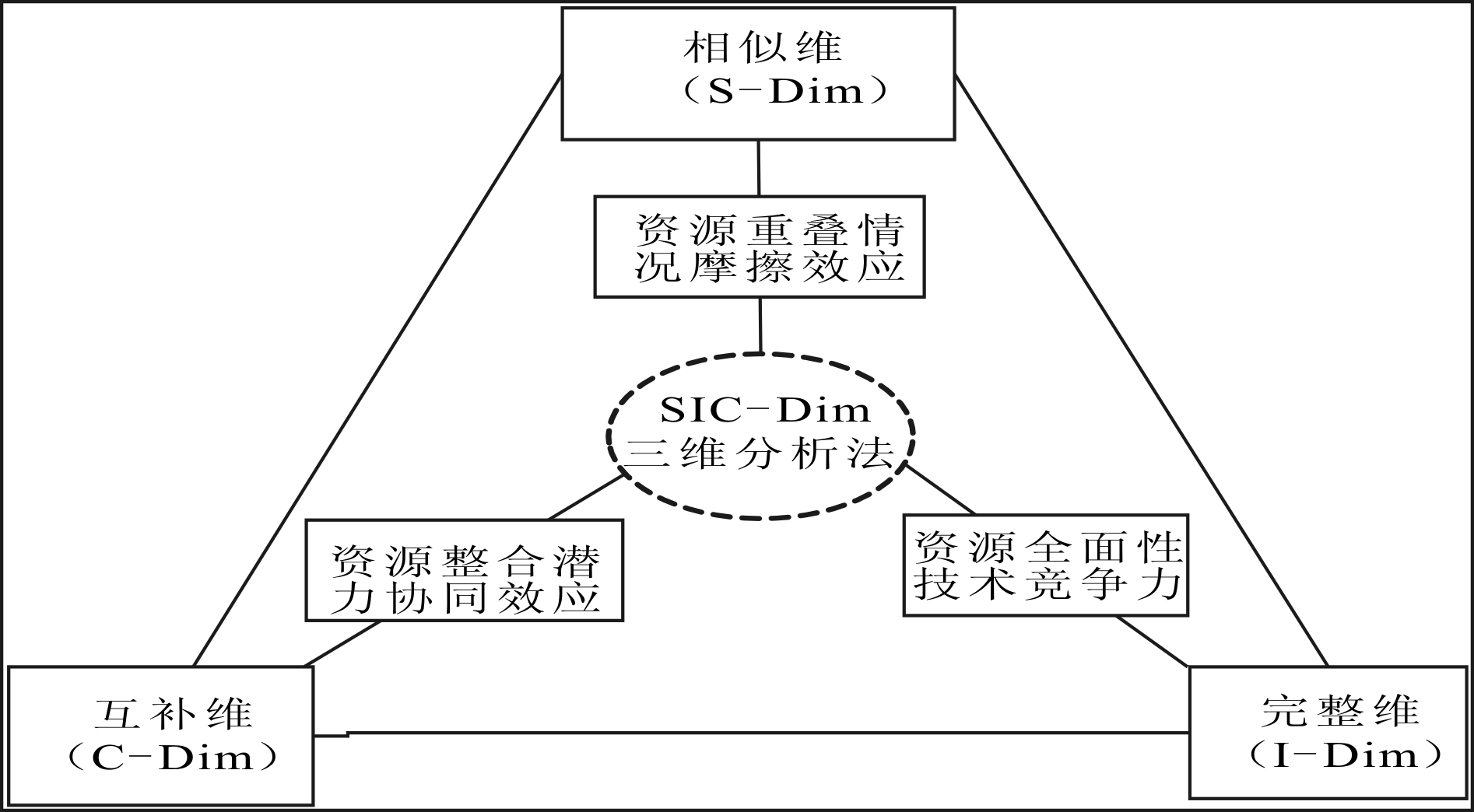
图2 SIC-Dim三维分析法框架
资源相似维(S-Dim):表示潜在研发合作伙伴间技术资源的重叠程度,相似性可以促进现有资源的相互理解和分享,然而相似性太多会减少合作方学习机会、降低研发努力,带来摩擦效应。
资源完整维(I-Dim):通过研发合作获得核心技术领域的相关资源,从而增强在相关领域的竞争力,以获取更大的合作效用。该维度结合了技术份额和研发重点两个指标,可反映出研发伙伴组合的技术竞争力。
资源互补维(C-Dim):研发合作伙伴的不同资源组合或者重新配置会创造合作前单个企业不能获得的协同价值。该维度能反映出研发合作伙伴技术资源中异质性必要组成部分的整合潜力,以及通过研发合作带来的协同价值。
SIC-Dim三维分析法将上述3个维度有机融合在一起,与此对应,本文设计出技术资源完整性ITR、技术资源相似性STR以及技术资源互补性CTR等3个定量指标,旨在量化研发合作伙伴间技术资源的匹配情况,各指标含义及其计算公式如表2所示。
基于以上3个指标,本文主要从定性、定量两个角度深入分析技术资源匹配情况:首先,对研发合作伙伴技术资源匹配的组合形式进行定性分析;然后,对技术资源匹配度进行定量分析,并对最终研发合作伙伴进行选择。
2.4.1 资源组合形式定性分析
Das[20]认为,根据资源的相似性与效用性,研发合作企业的资源组合有4种不同形式,如图3资源组合形式所示,分别为:①资源补充型。不同类型的资源,互补性较强;②资源扩充型。扩大资源总量,资源类型相似;③资源浪费型。资源类型不同、资源匹配和协调不良;④资源剩余型。资源类型相似、资源闲置。
表2 ITR、STR、CTR指标含义及表达式
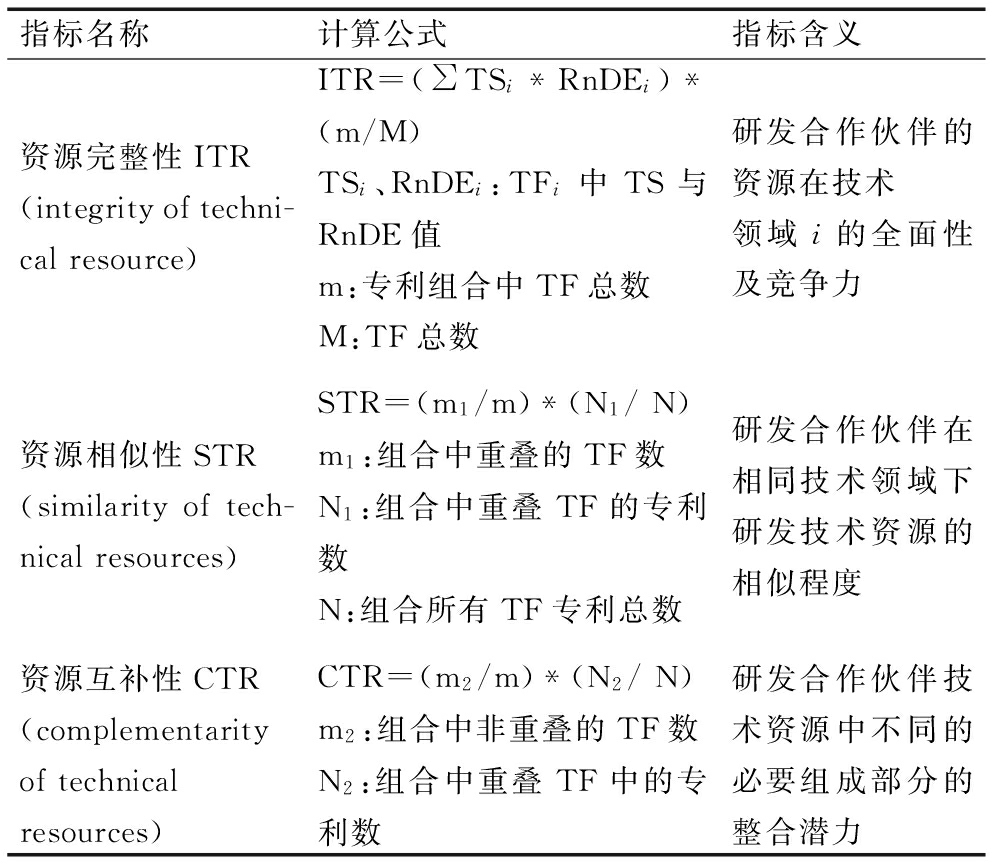
指标名称计算公式指标含义资源完整性ITR(integrityoftechni-calresource)ITR=(∑TSi*RnDEi)*(m/M)TSi、RnDEi:TFi中TS与RnDE值m:专利组合中TF总数M:TF总数研发合作伙伴的资源在技术领域i的全面性及竞争力资源相似性STR(similarityoftech-nicalresources)STR=(m1/m)*(N1/N)m1:组合中重叠的TF数N1:组合中重叠TF的专利数N:组合所有TF专利总数研发合作伙伴在相同技术领域下研发技术资源的相似程度资源互补性CTR(complementarityoftechnicalresources)CTR=(m2/m)*(N2/N)m2:组合中非重叠的TF数N2:组合中重叠TF中的专利数研发合作伙伴技术资源中不同的必要组成部分的整合潜力
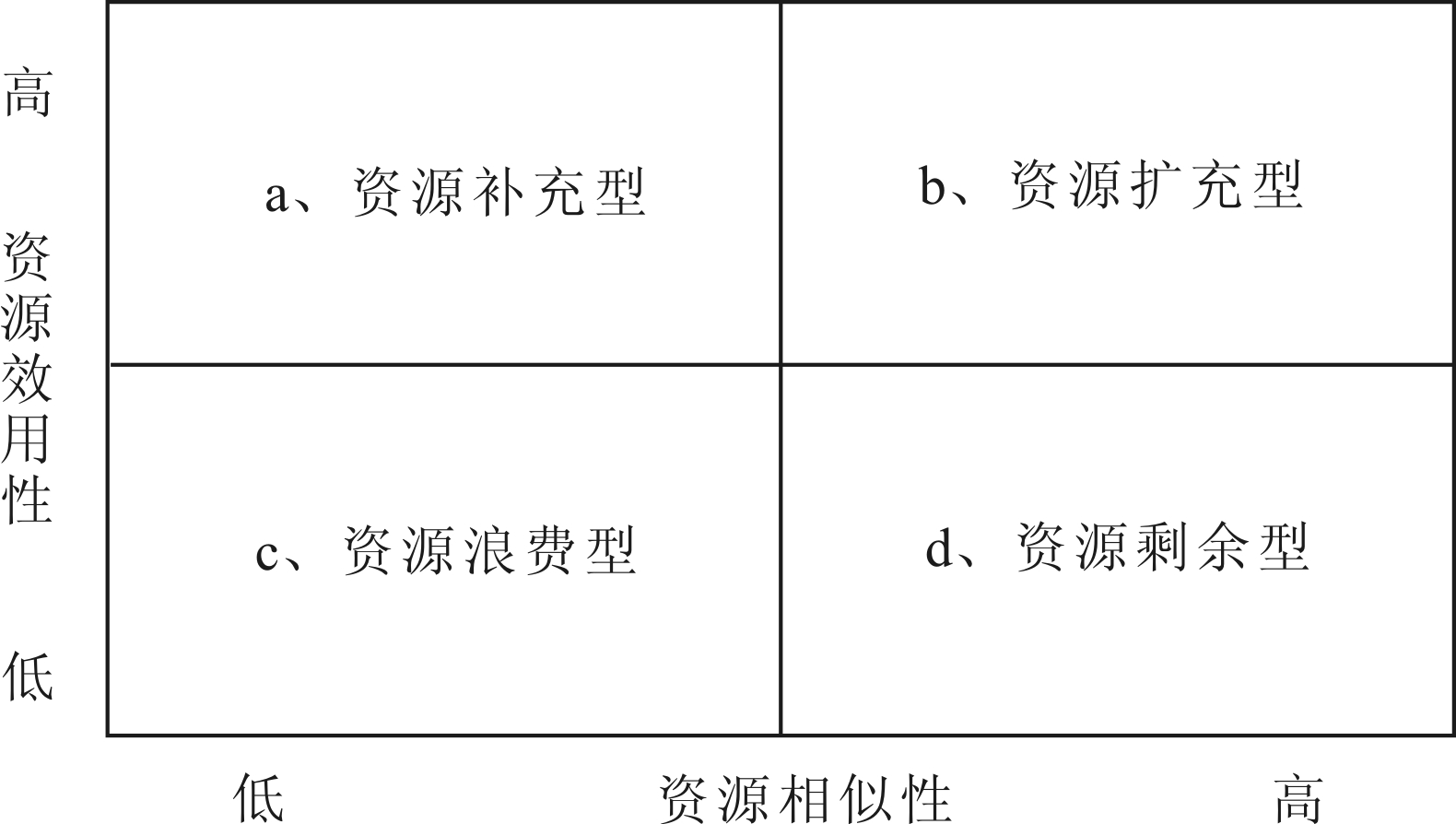
图3 资源组合形式
技术资源是企业资源束的要素之一,可以利用该模型对企业技术资源匹配形式进行评估。资源效用性是指投入资源被使用并实现联盟目标的程度。为了更好地进行量化统计,本文定义资源效用性(UTR)计算公式为:
UTR=(∑TSi*RnDEi )*(m/M)+
(m2 /m)*(N2/ N)=ITR+CTR
(1)
UTR指标表示通过研发合作方式获取技术资源后,研发伙伴联盟中各企业资源的整合效益及其在核心技术领域的竞争力,即技术资源完整性与技术资源互补性带来的效用之和,具体计算结果如表5所示。在上述4种资源组织形式中,前两种资源组合与研发合作绩效正相关,后两种资源组合与研发合作绩效负相关。
2.4.2 资源匹配度定量分析
在这一步中,基于SIC-Dim三维分析法提出了研发合作伙伴技术资源匹配度(Match Degree)指标。一组特定研发合作伙伴的资源匹配程度有特定的ITR,STR 以及CTR价值,这3个指标对于技术资源匹配度的影响分别用Im-ITR,Im-STR 以及Im-CTR表示。
首先,研发合作的目的是通过合作获得核心技术领域的相关资源,从而增强在相关领域的竞争力,获取更大的合作效用。ITR值越大,通过研发合作实现的核心技术领域的资源越多,研发合作效果越好。因此,ITR与资源匹配的价值正相关,ITR对于资源匹配影响的Im-ITR公式定义为:
Im-ITR=a1*ITR
(2)
式(2)中, a1=1。由于ITR对资源匹配度具有积极作用,因而Im-ITR取值范围为(0,1)。
其次,技术资源相似性STR使得重组创新机会与知识同化效果达到权衡,技术知识需要差异需要达到足够提供新机会和研究激励,才能带来合作后较佳的创新表现。因此,STR价值与研发合作绩效Z之间呈倒U型关系。Im-STR[21]公式定义为:
Im-STR=a2*(ITR-b)2+c
(3)
式(3)中,a2=-4,b=0.5,c=1。由于该函数是一个开口向上的二次函数,当Im-STR取最小值零时,STR取得一个极值(0或1);当Im-STR取最大值时,STR取中间值(0.5)。
第三,对于CTR,优选较大值。因为较高的CTR值意味着较大的资源兼容与异质资源获取可能性。基于CTR对于专利组合的这种正面影响,Im-CTR计算式为:
Im-CTR=a3*CTR
(4)
式(4)中,a3=1。该表达式为正斜率线性函数,随着ITR值从0到1增长,Im-ITR值也从0到1增长。
研发合作伙伴技术资源匹配度MD结合了ITR、CTR以及STR等3个指标,可以同时涵盖研发伙伴间资源的互补性、相似性以及完整性,MD计算公式为:
MD= W1*Im-ITR+W2*Im-
STR+W3*Im-CTR
(5)
式(5)中,W1、W2、W3>0,W1+W2+W3=1;W1,W2和W3分别代表ITR,STR和CTR的相对重要性。MD可以根据设置Im-ITR,Im-STR 以及Im-CTR的权重发生变化。
通过对MD值的计算结果进行数据分析,定量分析各研发合作伙伴组合的资源匹配状况,从而选择资源匹配状况好的企业作为研发合作伙伴。
当前形势下,“机器换人”在很多行业和领域正在变为现实[21]。业界一致认为,发展以工业机器人为核心的智能制造技术将成为我国走向制造强国的必由之路[22]。因此,本文以工业机器人相关技术为案例,阐释基于综合资源匹配模型的研发合作伙伴识别与选择过程。
3.1 数据采集与预处理
在德温特专利数据库中检索与工业机器人相关的专利。在检索表达式选择方面,TS= ("Industr* robot*"NOT("Entertain* robot*" OR "agricultur* robot*" OR "military robot*" OR "Bio* robot*" OR "educat* robot*" OR "surgical* robot*" OR "medical* robot*" OR "service robot*")),数据检索时段为2001年1月-2015年12月,共得到6 830个专利族(数据下载时间 2016年5月20日)。
通过数据筛选,最终确定1 674个不同的机构专利权人,并选择由机构专利权人注册的5 439个专利族进行进一步分析。
3.2 潜在研发合作伙伴初步识别
通过查阅相关资料可知,我国工业机器人领域发展现状是忽视关键技术突破、核心部件依赖进口,在高精密减速器方面的差距尤为明显[21 23]。通过文献查阅、领域专家评价以及文本挖掘等途径,确定了高精密减速器的两大主要技术需求[23-24],并表示为AO结构形式:①将转速降到工业机器人各部位需要的速度,A结构为(reduce,montor ,fix, set,detect, arrange),O结构为(rotation ,Speed,rpm speed),共18个(6*3)AO结构;②提高和确保工业机器人的精度,A结构为(improve,ensure),O结构为(accuracy ,efficiency),共4个(2*2)AO结构。其次,利用编程初步提取专利摘要文档的AO 结构,对于不完善的结果进行人工甄别。最后,计算各专利与技术需求的相关性得分RS,以此识别具有技术能力的研发合作伙伴。
本文选择相关性得分高于阈值0.77的专利权人作为初筛选的研发合作伙伴。最后,11个机构(表3)被选作具备精密减速器技术能力的研发合作伙伴候选者。
表3 研发合作伙伴初步识别
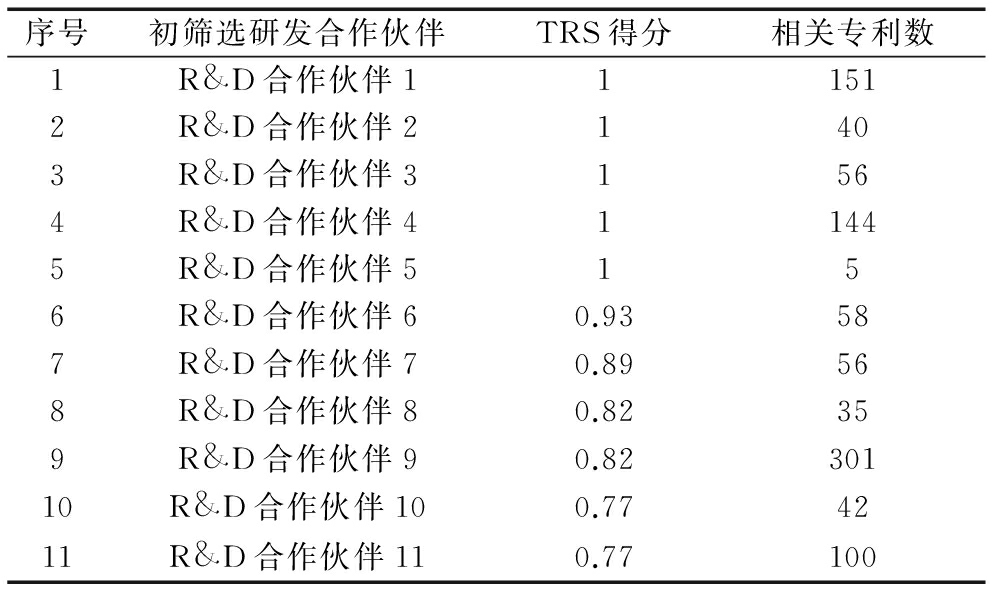
序号初筛选研发合作伙伴TRS得分相关专利数1R&D合作伙伴111512R&D合作伙伴21403R&D合作伙伴31564R&D合作伙伴411445R&D合作伙伴5156R&D合作伙伴60.93587R&D合作伙伴70.89568R&D合作伙伴80.82359R&D合作伙伴90.8230110R&D合作伙伴100.774211R&D合作伙伴110.77100
3.3 精密减速器相关技术领域分析
在这一步中,主要识别精密减速器相关技术领域。首先,对专利IPC号进行筛选和计算,最终选择申请频繁的占专利数据集85.96%的26个IPC代码作为初始集;其次,根据IPC共现频次进行K-means聚类分析,对不同K值进行分析后发现,选择5作为聚类数目时,各组IPC号不小于3个且不大于7个,相对比较均匀。由此得到的5个群组即为精密减速器涉及的5个主要技术领域(TF)(见表4)。
为了更加直观地观测聚类结果,将专利IPC代码共现矩阵导入 ucinet 软件,使不同类别可视化,结果如图4所示。
初步识别出的11个合作伙伴之后,计算他们在精密减速器相关的各技术领域的TS以及RnDE得分,得分结果见表5。
表4 精密减速器相关的技术领域

IPC代码聚类结果IPC代码技术领域TF1B25JG05BG06FG05DH01HG09BA63H技术领域TF2G01BG01DG01L技术领域TF3H23QB21DH23PB23PB65GB25B技术领域TF4H01LH05KB05BH02G技术领域TF5F16HH02PF16CH01MH02KF16D
3.4 资源匹配评估与最终研发合作伙伴识别
在最后一步,从定性与定量两个方面评估潜在研发伙伴间资源匹配情况。鉴于筛选出的11个潜在研发合作伙伴,采用MATLAB编码检验2 047(211-1)个研发合作伙伴组合的资源匹配情况。
3.4.1 资源组合形式定性分析
基于SIC-Dimension三维分析法,根据求出的各组合作伙伴ITR、STR、CTR值,并在此基础上得到UTR值,将各组合作伙伴的专利组合形式投影到二维坐标系中(见图5)。从图5可以看出,大约一半的合作伙伴资源组合形式处于资源浪费或资源剩余状态,资源效用性较低,与研发合作绩效呈负相关关系,不适合选作研发合作伙伴;另一半研发伙伴资源匹配的效用性较好,可促进研发绩效提高,后文进一步对资源匹配情况进行匹配度定量计算,从而量化处于同一资源匹配形式中不同合作伙伴的匹配度差异,有助于优选研发合作伙伴。
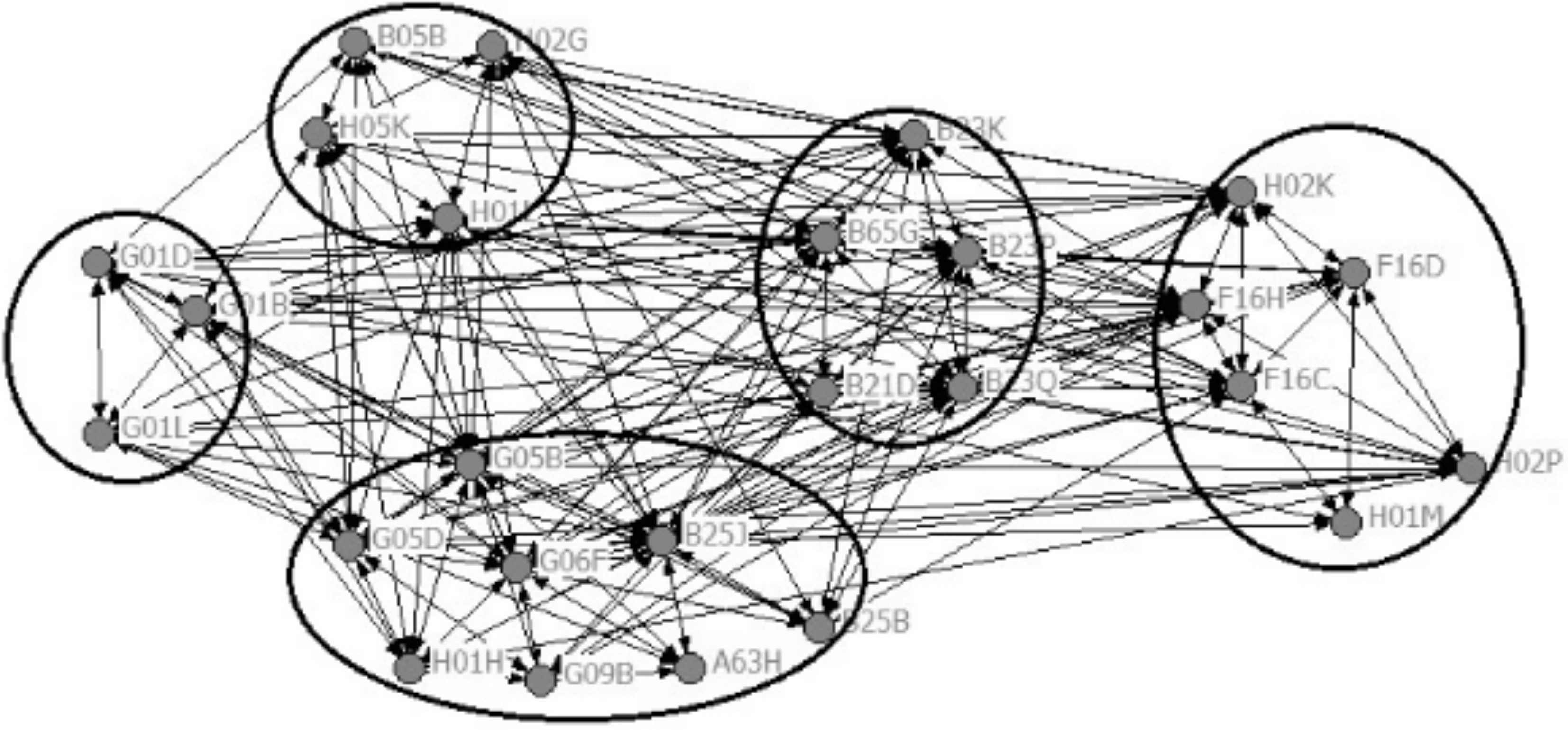
图4 精密减速器相关的技术领域可视化
表5 各R&D合作伙伴TS及RnDE得分
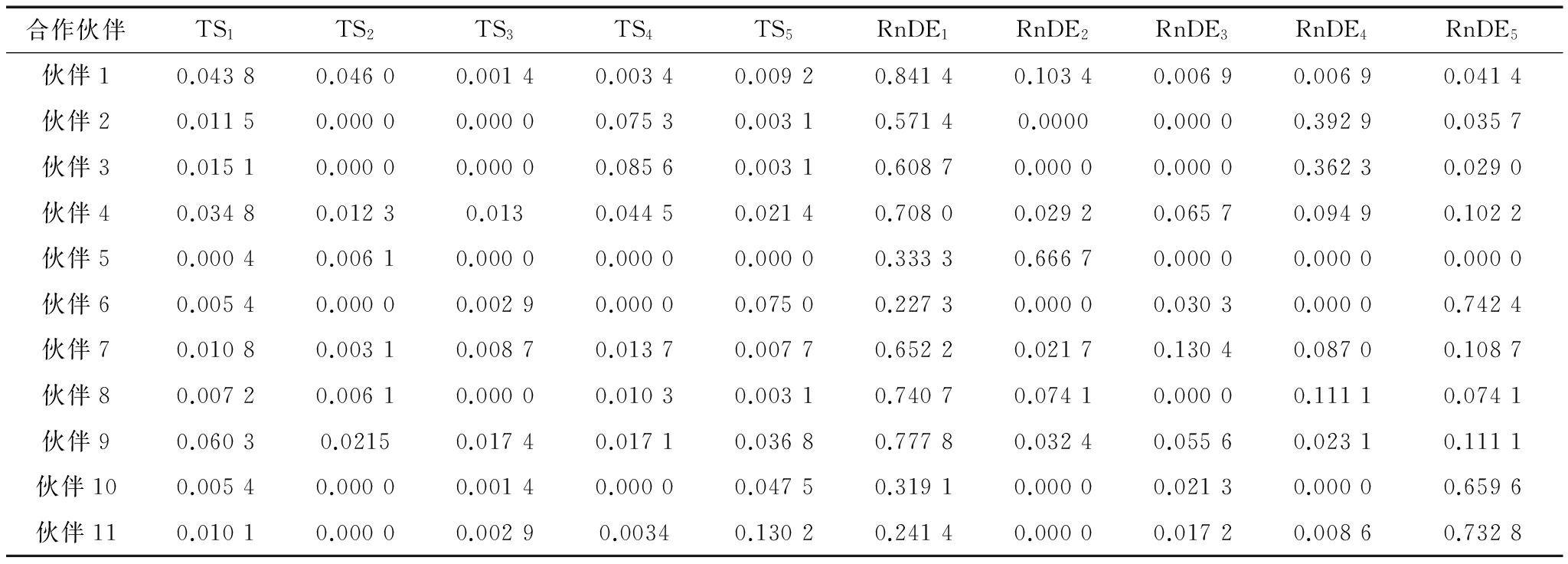
合作伙伴TS1TS2TS3TS4TS5RnDE1RnDE2RnDE3RnDE4RnDE5伙伴10.04380.04600.00140.00340.00920.84140.10340.00690.00690.0414伙伴20.01150.00000.00000.07530.00310.57140.00000.00000.39290.0357伙伴30.01510.00000.00000.08560.00310.60870.00000.00000.36230.0290伙伴40.03480.01230.0130.04450.02140.70800.02920.06570.09490.1022伙伴50.00040.00610.00000.00000.00000.33330.66670.00000.00000.0000伙伴60.00540.00000.00290.00000.07500.22730.00000.03030.00000.7424伙伴70.01080.00310.00870.01370.00770.65220.02170.13040.08700.1087伙伴80.00720.00610.00000.01030.00310.74070.07410.00000.11110.0741伙伴90.06030.02150.01740.01710.03680.77780.03240.05560.02310.1111伙伴100.00540.00000.00140.00000.04750.31910.00000.02130.00000.6596伙伴110.01010.00000.00290.00340.13020.24140.00000.01720.00860.7328
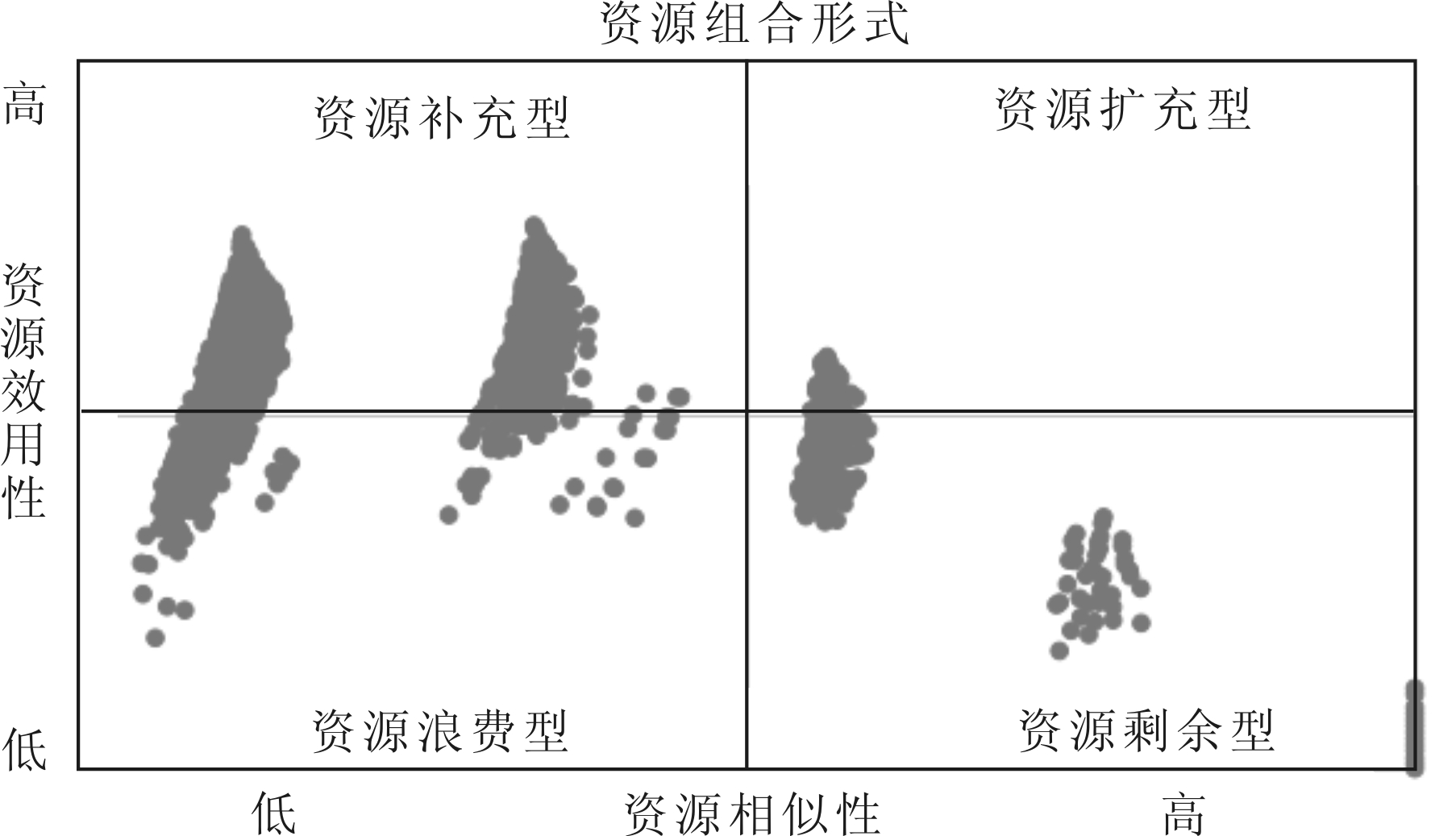
图5 各研发伙伴组合的资源组合形式
3.4.2 资源匹配度定量分析
为了避免极端情况,本文从平衡视角考虑评价标准,在评估潜在研发伙伴间资源匹配情况时,本文对3个指标设置相同的权重值,即W1= W2= W3= 1/3。专利组合中资源匹配度MD= 1/3*Im-ITR+1/3*Im-STR+1/3*Im-CTR,对2 047组合作伙伴资源匹配的MD值进行计算,其结果如图6所示。
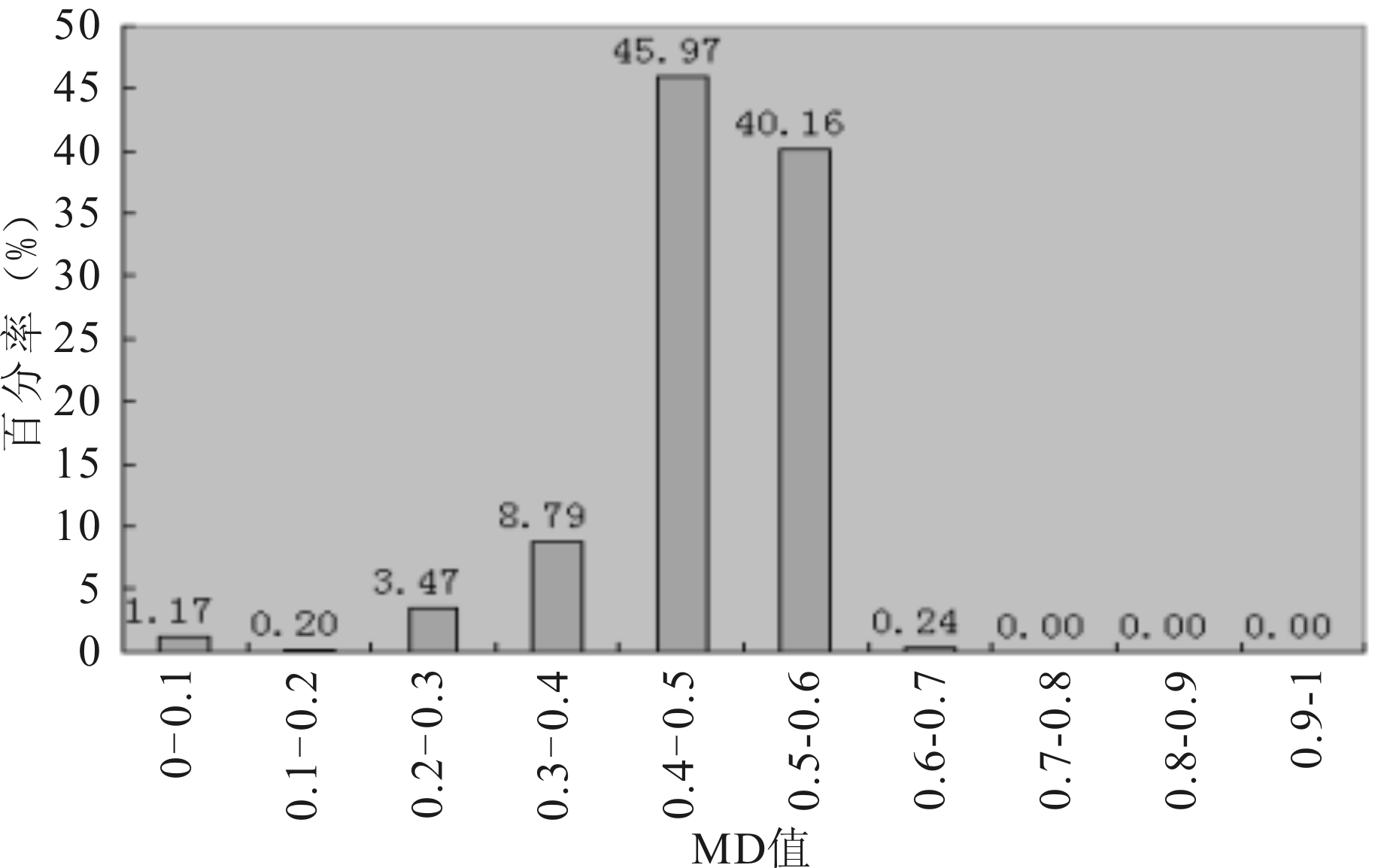
图6 MD值分布情况
对资源匹配度MD的计算结果进行数据分析,中位数、平均值以及标准差分别为0.483、0477、0.091,有59.6%的研发合作伙伴资源匹配MD值低于0.5,在资源匹配方面表现出较差的绩效,不适合进行研发合作,这一点与前文关于资源组合形式得出的结论一致;有40.16%研发合作伙伴资源匹配MD值介于0.5~0.6,资源匹配状况良好,与其进行研发合作具有一定积极作用;仅有0.24%的研发合作伙伴资源匹配MD值大于0.6,其在资源匹配方面有很好的表现,与之合作能有效促进研发效益。在资源匹配良好的组合中,选择匹配度MD值最高的组合(2,6,8,11)作为最佳研发合作伙伴联盟,能够最大化合作绩效。
通过对技术资源的定性与定量匹配,以及多指标的综合识别筛选,构建了资源匹配视角下的研发合作伙伴识别与选择模型。以工业机器人为例的实证研究,不仅描述了模型的实施步骤,也验证了模型的有效性。研究结果表明:第一,具有技术能力的研发合作伙伴有时会在资源匹配方面出现较差的表现,此时仅考虑合作伙伴的技术能力而忽视资源匹配情况会导致合作伙伴选择失败;第二,资源匹配状况的定性分析可确定资源匹配的不同类型,定量分析可测度同种匹配类型的差异,更精确地选择合作伙伴;第三,该模型在进行合作伙伴识别时,主要依据文本挖掘来提取专利信息AO结构并测度合作伙伴的能力。因此,文本挖掘的准确性直接影响着伙伴识别的有效性。
参考文献:
[1] DAS T K,TENG B S.A resource-based theory of strategic alliances[J].Journal of Management,2000,26(1):31-61.
[2] GEUM Y,LEE S,et al.Identifying and evaluating strategic partners for collaborative R&D:index-based approach using patents and publications [J].Technovation,2013,33 (s6 /7):211-224.
[3] JEON J,LEE C,PARK Y.How to use patent information to search potential technology partners in open innovation [J].Journal of Intellectual Property Rights,2011,16(5):385-393.
[4] 汪雪锋,付芸等.基于 SAO 分析的 R&D 合作伙伴识别研究[J].科研管理,2015,36(10):19-27.
[5] HAGEDOORN J. Inter-firm R&D partnerships:an overview of major trends and patterns since 1960[J].R esearch Policy,2002,31(4):477-492.
[6] 纪慧生,王红卫,陆强.基于知识特征的企业研发伙伴选择[J].沈阳工业大学学报:社会科学版,2011,4(2):137-140.
[7] MOHR J,SPEKMAN R.Characteristics of partnership success:partnership attributes,communica- tion behavior,and conflict resolution techniques[J].Strategic Management Journal,2006,15(2) :135-152.
[8] 彭展声.合作研发伙伴选择的群决策模型[J].统计与决策,2007(3):142-143.
[9] CASCINI G,FANTECHI A,SPINICCI E.Natural language processing of patents and technical documentation[M].Springer Berlin Heidelberg,2004:508-520.
[10] 张晓黎,陆新华.技术相似关系对技术创新绩效的影响[J].科技进步与对策,2016,33(18):28-34.
[11] CHEN S H,WANG P W,CHEN CM,et al. An analytic hierarchy process approach with linguistic variables for selection of an R&D strategic alliance partner[J].Computers & Industrial Engineering,2010(58):278-287.
[12] BOMI SONG ,HYEONJU SEOL ,YONGTAE PARK.A patent portfolio-based approach for assessing potential R&D partners:an application of the Shapley value[J].Technological Forecasting & Social Change,2016(103):156-165.
[13] 徐 浩,刘宇琴.资源互补、 技术共享对企业研发联盟合作绩效影响实证研究[J].商业经济研究,2015(24):107-109.
[14] WANG M Y. Exploring potential R&D collaborators with complementary technologies:the case of biosensors[J].Technological Forecasting & Social Change 2012.79 (5),862-874.
[15] BYUNGUN YOON,BOMI SONG.A systematic approach of partner selection for open innovation [J].Industrial Management &Data System,2014,114(7) :1068-1093.
[16] LAURSEN K,SALTER A.Open for innovation:the role of openness in explaining innovation performance among U.K.manufacturing firms[J].Strateg Manag J,2006,27(2):131-150.
[17] NO H J,PARK Y..Trajectory patterns of technology fusion:trend analysis and taxonomical grouping in nanobiotechnology[J].Technological Forecasting & Social Change,2010 ,77 (1):63-75.
[18] CURRAN C S,LEKER J..Patent indicators for monitoring convergence-examples from NFF and ICT[J].Technological Forecasting & Social Change ,2011,78 (2):256-273.
[19] ERNST H.Patent information for strategic technology management [J].World Patent Information,2003,25(25):233-242.
[20] T K DAS,B S TENG.Partner analysis and alliance performance[J].Scandinavian Journal of Management,2003(19):279- 308.
[21] 刘彦华.中国机器人“闯关”[J]小康·财智,2016(5):38-40.
[22] 骆敏舟,方健,等.工业机器人的技术发展及其应用[J].机械制造与自动化,2015,44(1):1-4.
[23] 计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32(1):1-13.
[24] 王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
(责任编辑:林思睿)
Identification and Selection of R&D Partners based on Integrated Resource Matching Model
Abstract:With the industry "4.0" era of increasing technical complexity ,the demand for enterprise R & D cooperative is increased,R & D partner identification and selection from the perspective of resource matching has been highly concerned .In view of the existing research lack of systematic evaluation model,and the resource matching situation is mainly based on expert subjective judgment,,this paper designed a SIC-Dimension three-dimensional evaluation model composed of complementarity,similarity and integrity indicators,which not only can improve the effectiveness of R & D cooperation partners dentification,but also reduces the complexity and subjectivity of the R & D partner selection process by combining qualitative and quantitative matching analysis.Finally,the application of the evaluation model is illustrated by the technology of industrial robots.The empirical results further validate the value of the multi-index comprehensive evaluation model.
Key Words:Technical Resources;R&D Cooperation;Partner Selection;Matching Relationship
收稿日期:2016-11-25
基金项目:国家社会科学基金重大项目(11&ZD140)
DOI:10.6049/kjjbydc.2016090631
中图分类号:F273.1
文献标识码:A
文章编号:1001-7348(2017)14-0023-07