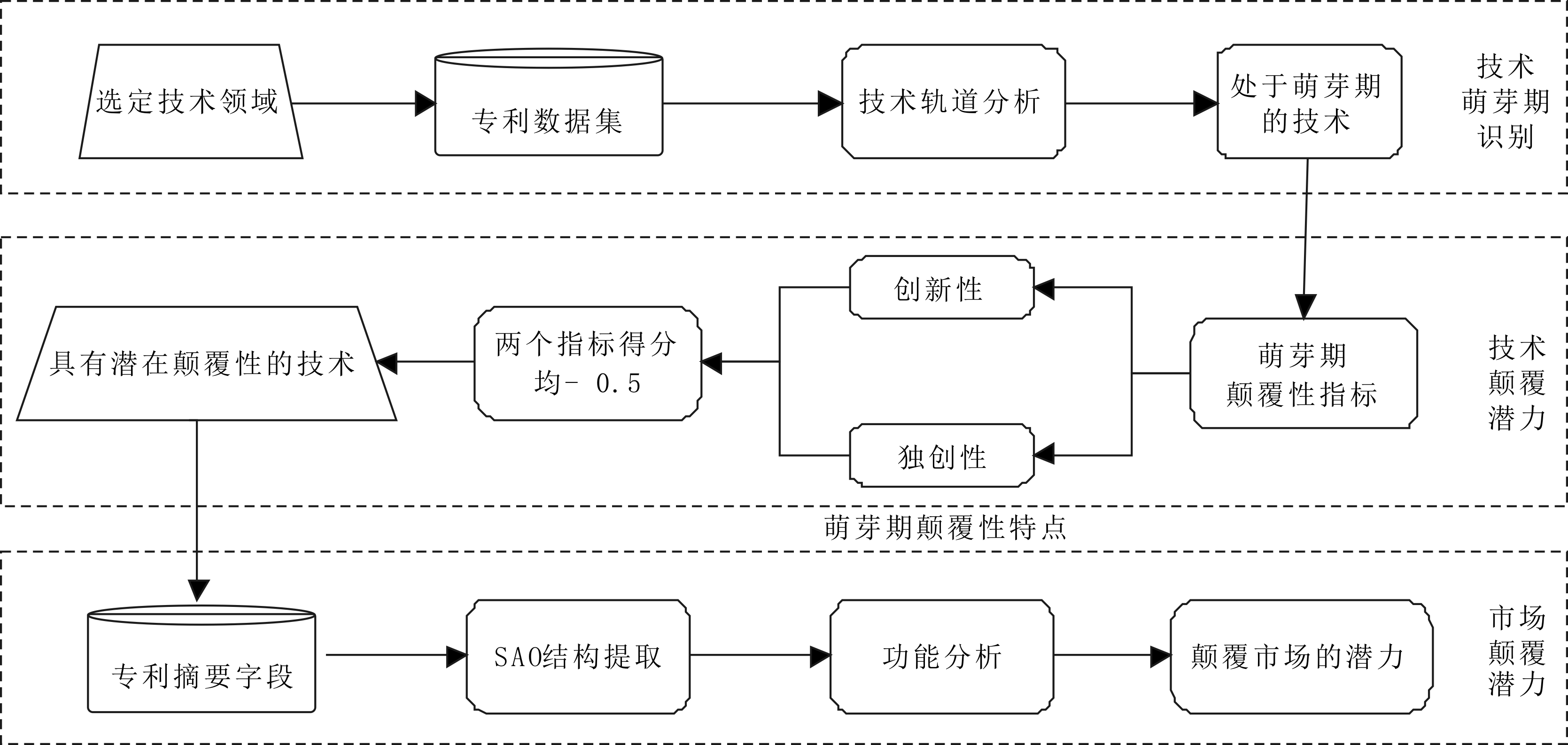
图1 萌芽期颠覆性技术识别过程
当前全球化浪潮下,市场环境变化和新技术迅速发展让企业面临着前所未有的挑战,对技术研发与市场选择提出了更高要求。1997年,克里斯坦森[1]首次提出颠覆性技术(disruptive technology)概念,这类技术并不遵循传统技术发展路线,入侵速度快,对以往技术与市场具有强大的破坏力。诸多案例已经证明,谁能及时发现和抓住颠覆性技术创新机遇,谁就能在竞争中赢得先机。
颠覆性技术发展具有高度不确定性,拥有漫长的开发与研究过程。因此,为了充分把握颠覆性技术的起源、扩散和影响,在其对市场产生重大影响之前加以判断,就需要及早确定这类技术的特点,进行早期识别,为企业布局与研发相关技术提供参考。
为了较为全面地获取与颠覆性技术识别相关的文献,本研究通过web of science数据库进行检索,检索式为:TS= (regoniz* or assess* or forecast* or identif* or evaluat* or predict* or detect* or anticipat* or measur* or discover*) AND ("disruptive technolog*" or "disruptive* innovation*" or "potential disruptive*"),去除无关与非核心文章,最终得到核心论文68篇。经过研读发现,目前颠覆性技术识别方法大致可分为定性评估与定量识别两种。
技术路线图与德尔菲法是目前颠覆性技术定性评估的主要方法,部分学者以技术路线图作为有效辅助工具,通过探测时间演进中技术性能的变化与飞跃,对颠覆性技术进行预测[2][3]。但是,在研究中,技术路线图需要全面完整的技术数据,而颠覆性技术的历史数据较少,实践中往往做不到对技术的查全查准。也有学者利用德尔菲法识别颠覆性技术[4,5],但这种方法在预测过程中需要大量的人力物力,并且很大程度上依赖于专家的个人经验。
定量识别方法大多基于专利数据,通过建立数学模型与多指标评估框架对技术进行大范围评估,被广泛应用于评估颠覆性技术的影响[6-7]及市场价值[8-9]等方面。但这些研究是在颠覆性产生作用后进行的事后评价(ex post),易造成一些有潜力颠覆但尚未产生影响的技术被忽略,缺乏对生命周期初期技术的颠覆性判断。此外,由于识别出的颠覆性技术已崭露头角,错过了早期研发投资时机。
近年来,国内外出现了少量利用专利信息进行事前识别(ex ante)的研究。国外研究大多运用专利引文信息,识别阶段针对颠覆性技术的成长期及之后,如Momeni等[10]通过专利发展路径、K-core分析及主题模型相结合的方法评判光伏产业中有潜力的颠覆性技术;Chen等[11]通过分析颠覆性技术占领早期市场、成熟市场以及退出市场的时间进行早期识别;英国专利局[12]针对科学密集型颠覆性技术开发出使用专利指标的工具,帮助决策者识别有颠覆潜力的新兴技术。国内学者黄鲁成等[13]运用物种入侵模型及属性文本集进行分析,对评估技术方案出现前后属性集的相似性和颠覆性进行测度,该方法是在颠覆性技术成长期进行识别;苏敬勤等[14]通过分析专利数据信息属性,提出专利影响因子计量指标,并通过分析颠覆性技术与传统技术的引用率变化曲线识别出颠覆性技术轨道,但该阶段属于颠覆性技术成熟的中期阶段。
综上所述,以往研究未能针对萌芽期颠覆性技术进行识别,并且更重视颠覆性技术的市场影响,未从技术本身的特点入手。而萌芽期是技术在市场中追赶颠覆的重要阶段,技术的突破性进展是该阶段技术发展的主要动力来源。因此,从科学技术因素入手进行萌芽期颠覆性技术识别是可行的。
针对现有研究的局限性,本文以专利信息为基础,提出萌芽期颠覆性技术的识别思路。首先,根据技术发展情况,选定可能出现颠覆性技术的技术领域,通过DI专利数据库获取相关专利数据集,借助技术生命周期识别方法找到技术领域中处于萌芽期的专利技术;其次,利用Java语言计算创新性和独创性指标得分,经过反复尝试,指标得分均大于0.5的专利被认为具有潜在颠覆性。最后,对于上述专利技术进行功能分析,提取专利摘要字段的AO结构作为技术功能词提取的基础,通过对提取出的新功能词进行分析,判断潜在颠覆性技术对未来市场的影响。本研究技术路线如图1所示。
图1 萌芽期颠覆性技术识别过程
2.1.1 颠覆性技术出现时期分析
技术生命周期发展遵循S型曲线,发展到一定阶段,持续性技术优化已经无法满足发展需要,技术进步需要颠覆性技术的进入(陈傲,2011)。新旧技术S曲线之间存在技术跳跃,每个成熟技术轨道的发展都可以认为是技术颠覆后的渐进式创新路径,而每个新技术轨道迅速演变,往往意味着新的颠覆性技术进入[15]。新旧技术交替(旧技术即将进入成熟期,新技术仍然处于萌芽期)时期既是颠覆性技术的出现期[16],也是技术在市场中追赶颠覆的机会,需要积极建立路径以完成超越与技术跨越过程[17]。但此时,由于现有成熟技术竞争力强以及新技术不成熟等原因,颠覆性技术并未对市场或行业产生重大影响,识别关键颠覆性技术对于企业提早进行研发决策至关重要。
在萌芽期,潜在市场和商业模式尚未明晰,并未展现出颠覆性特点,技术的突破性进展是该阶段颠覆性技术的主要动力来源,这些技术改变因技术研发局限性造成的产业市场落后状况,更多地具有突破性技术属性。进入成长期后,随着技术不断发展,逐步形成“技术推动”和“市场拉动”交替作用机制,市场拉动效果探测潜在市场机会,技术推动作用提供补充与指引。技术在发展到一定阶段与新的技术性能结合,应用于新的领域或产生新的商业模式后,颠覆性技术进入成熟期,展现其颠覆性特点,为现有市场和行业发展带来难以预料的影响。
颠覆性技术出现期如图2所示,在A时间点前后,将研发投资重心转移到新技术上,可以尽早在行业中占据研发与专利布局优势,而在B时点后,旧技术已无法满足市场对性能及数量的需求,在市场中被新的颠覆性技术取代。虽然这种模型在理论上是合理的,但是在实践中要想准确识别时间点A和B非常困难[18]。因此,可以根据技术自身早期的科学属性进行颠覆性识别,从而避开对时间点A和B进行直接判断。

图2 颠覆性技术出现期
2.1.2 技术生命周期识别方法
目前,用于技术生命周期判断的方法主要有S曲线法、专利指标法、相对增长率法和TCT计算法。其中,S曲线可以采用专门软件工具进行定量计算,准确推算各阶段数值,被广泛运用于技术生命周期判断。在S曲线应用中,高技术领域多采用logistic曲线[19],适合本文研究对象。由于颠覆性技术的不连续特点,单独研究某颠覆性技术的技术轨道可能存在跃迁情况,但整个技术领域的生命周期发展仍然遵循S曲线的特点,此处要区分开来。S曲线拟合公式如下:
(1)
其中,L、a、b 均为常数,t为时间,y为因变量。
本文运用美国Rockefeller University大学开发的Loglet Lab软件作为运算工具,该工具可以通过数学计算推导生命周期各阶段的分界点,进行S曲线的预测。运算结果包括3个参数:饱和点Ys(Saturation),即预计专利累积量的最高值;成长时间tg(Growth Time),即技术出现最大效用值的10%-90%所需的时间;反曲点tm(Midpoint),即二次微分由正转负的零值点。通过对式(1)进行求导计算得到:萌芽期与成长期的分界点t1=tm-tg/2,成长期与成熟期的分界点t2=tm,成熟期与衰退期的分界点t3=tm+tg/2。
Arthur[20,21]发现,技术通常是沿着特定可预测的技术轨迹发展的,偶尔会因范式变革而产生一定的不连续性,造成不连续的核心是一些新兴技术引入,这类技术可以开启新的市场和潜在应用,被认为是具有颠覆性的技术。他界定了这类技术的特点:不同于过去技术,具有全新的技术组合方式;不局限于特定领域,常常来源于不同的技术类别;对未来技术发展产生深远影响。由于在萌芽期颠覆性技术并未开启潜在市场和商业模式,本文不将影响力作为萌芽期颠覆性技术的特点。
2.2.1 技术创新性
Arthur将技术定义为一种以相互联系的原理和成分组合成的,为实现某种特定目的的对象。Fleming[22]和Hargadon[23]研究指明,技术创新产生于现有技术原理组合。颠覆性技术是相对于渐进性技术而言的,区别在于它们如何组合现有技术原理,根据颠覆性技术的特点,这类技术并不是对现有技术的进一步改进,而是更大程度的创新,提供之前从未有过的技术原理的新组合。在专利研究中,国际专利分类号(IPC号)是技术功能与应用相结合、以技术功能为主的分类方式[24],只要专利中所涉及的功能特征相似即被划分到同一大组中,不强调技术的应用性。因此,可用国际专利分类号的大组代表技术所属原理或领域。
Verhoeven[25]在研究中曾经用IPC组合衡量技术对原理的重组创新程度,颠覆性技术是相对于渐进性技术而言的,区别在于它们是否对技术原理组合带来了前所未有的技术创新。本文借鉴Verhoeven研究中所使用的重组创新指标衡量技术创新程度,对某专利所有IPC大组进行成对组合。如果这种组合在之前的技术中没有出现,说明产生了新组合,则该组合被认为具有创新性。将该专利申请年之前的专利IPC组合视为通用组合,在此基础上寻找IPC的新组合进行衡量,本文用创新性指标(novelty)表示,计算式如下:
novelty=NCp/Cp;NCp Cp
Cp
(2)
NCp是专利p自身在其申请年之前从未出现的IPC大组组合数目,分母Cp是专利p自身的IPC大组组合数目。指标得分越高,专利创新程度就越高。
在使用创新性指标方法时,需要专利至少属于两个IPC组合,当专利仅涉及到一个专利组时,指标无法被定义。虽然这些专利在独创性指标中仍然得分,但无法作出实质性重组,也不会有任何创新重组,因而将此类专利的创新性指标得分视为0。
2.2.2 技术独创性
2015年OECD研究报告对于衡量技术发展前景的专利指标进行了阐述,其中,借助专利引用领域的多样性,即专利的后向引用是否属于其它技术领域,对技术突破性程度进行判断[26]。在萌芽期,科学技术突破性进展是颠覆性技术的主要动力来源,它们可以改变因技术研发局限性造成的产业市场落后状况,将原有技术引入新的技术领域,进而引发一系列颠覆性改变[27]。因此,可以采用技术的突破性进展衡量早期颠覆性技术。
专利所参照的技术领域代表了该专利的来源和依赖过去技术的程度,相较于持续性创新是依赖现有技术所作的部分改进,颠覆性技术参照的技术领域与自身技术领域有很大不同,具有独创性特点。本文借鉴上述OECD研究中使用的指标,用专利技术所属的IPC大组代表技术领域,对于颠覆性技术的独创程度进行衡量。总的来说,引用结构的不同意味着专利自身与其依赖的技术知识来源不同,通过研究专利引用结构与其自身结构的相似性,可衡量专利相对以往技术的独创程度。
独创性(uniqueness)指标反映一个专利的后向引用专利属于非自身技术领域的程度,也是该专利依赖之前专利的程度,计算式如下:

(3)
其中,专利j是原始专利,专利p是专利j的后向引用专利。CTj表示专利j排除原始专利p本身包含IPC号后IPC大组的数目(IPCpj),分母np代表原始专利p的全部后向引用中IPC大组的数量。指标得分越高,专利依赖的技术多样性就越高。
2.3.1 功能分析概述
功能从定义看,是指用户目标和产品可衡量效果之间的技术连接,是用户对产品物理表现形式解释的结果。功能构成是技术规范语言与日常生活的语言之间联系的纽带,如对于工业机器人来说,技术人员集中精力在伺服电机、驱动器和传感器等技术上,而使用者关心其在重工业生产、智能制造方面的具体应用。
对于颠覆性技术来说,最开始出现在与现有成熟技术不同的领域体系中,不易被一般企业察觉。随着越来越多技术创新涌现,它们一旦发展到某一水平,新技术性能为市场带来的全新商业模式逐渐成熟,颠覆性技术就能以极快速度侵入并淘汰原有成熟技术。一般来说,在旧技术被淘汰的时间点之前采用颠覆性技术是有利可图的,但在实践应用中,人们难以确定技术发展并准确预测时间点。功能分析方法可以解决这个难题,通过分析技术功能变化对于找出可能颠覆的市场模式至关重要。
2.3.2 功能词提取
功能是流程上的操作,在Pahl和Beitz提出的经典功能分析方法中[28,29],功能分解可用动词+名词的组合代表。其中,动词描述动作或操作,名词描述操作对象,产品功能分解可用动词+名词组合对表示,作为功能词提取标准。
SAO(Subject-Action-Object)结构即主(S)谓(A/V)宾(O)结构,由Yoon等[30]在2013年提出,可以清晰描述主谓宾关系,避免了自然语言处理可能出现的问题,从大量无结构的文本信息中抽取有价值信息和知识。SAO结构被认为跟“功能”概念相关,谓语Action改变了宾语Object的一个特征。如“user guide robot”,主语是user,谓语是guide,宾语是robot,guide改变了robot的特征。因此,本文将SAO结构引入功能词提取,通过提取专利AO结构方式提取与分析功能词。
对于满足两性指标的专利,采用自然语言处理技术提取专利文本的AO结构,将文本分解为技术功能标准,并分类形成功能图,据此分析颠覆性技术趋势。尽管新功能并不必然带来颠覆性技术,但没有新功能作为基础的商业模式创新也难以形成稳定的新市场[31]。当技术处于萌芽期,难以得到市场相应数据时,从功能出发识别潜在颠覆性技术,是早期识别的一种可操作方法。
根据国际工业机器人协会IFR(International Federation of Robotics)的报告[32],工业机器人的市场销量在过去3年增长了34%,2016年全球销量29万台,工业机器人密度(每万名工人使用工业机器人数量)迅速攀升,达到66台/万人。但是数据显示,目前产量并不能满足市场需求,说明现有技术发展无法使工业机器人产量与功能达到市场需求,需要新技术产生。本研究采用工业机器人领域作为实证研究,识别其中颠覆性技术,为该领域技术与产业发展提供一定的战略思考与建议。
3.1.1 工业机器人分类与检索
目前,对工业机器人的分类有多种方式,按照结构分为减速器、伺服电机、传感器、末端执行器等[33],能够描述机器人的核心组成,更适于针对成熟技术开展产业化布局。但对于颠覆性技术来说,最开始出现的可能并不是某个特定结构,这样的分类会忽略一些新出现的必要专利。国家知识产权战略实施基地将工业机器人分为示教再现机器人、感知机器人与智能机器人[34],该分类很好地反映了机器人技术的阶段性发展历程,有助于对颠覆性技术的早期识别。由于示教再现机器人在90年代已逐渐被感知机器人所取代,故本文不作分析。
本文工业机器人领域的专利样本来源于Derwent Innovation(原Thomson Innovation)专利数据库,DI数据库是科睿唯安公司提供的专利检索与分析工具,是全球领先的专利信息平台。本文根据工业机器人分类定义与特点,构建专利检索表达式,采用主题与IPC号相结合的检索策略,感知机器人专利检索表达式为:TAB=((("industr* robot*") NOT care NOT health NOT medical NOT surgical NOT DNA) AND (percept* OR sens* OR multi*-sensor* OR Percept*-based OR Multisensory OR cognition OR adapt* OR "version percept*" OR "sensing system" OR "Robotic perceptual system" OR "Perceptual judgement")) AND IP=(B25J-009* OR B25J-019* OR B25J-015* OR B25J-017* OR B25J-013* OR B25J-005* OR B25J-011* OR G05B-019* OR B23P-019* OR B23K-009* OR F16H-001* OR G05D-003* OR B25J-018* OR F16C-029* OR B02Q-007* OR B25J-000*),检索年份为1977—2017年;智能机器人的检索表达式为:TAB=((("industr* robot*") NOT care NOT health NOT medical NOT surgical NOT DNA) AND (intelligen* OR self-adapt* OR self-learn* OR self-study OR self-taught OR "adapt* learning")),检索年份为2000—2017年。检索时间为2017年7月20日,共检索得到感知机器人专利9 268条,智能机器人专利899条。
3.1.2 曲线拟合与技术生命周期分析
根据检索到的专利数据,本研究中以S曲线模型为基础,纵坐标是专利数量,横坐标是时间,应用Loglet Lab推算技术成长曲线。其中,感知机器人与智能机器人分别开始出现在1980年与2000年前后,由于专利存在18个月左右的滞后期,2016年、2017年的专利数量可能不够完整,暂不作分析。将检索到的历年专利申请量输入Loglet Lab软件,进行logistic曲线拟合,生成时间—专利件数的技术发展趋势,如图3所示。
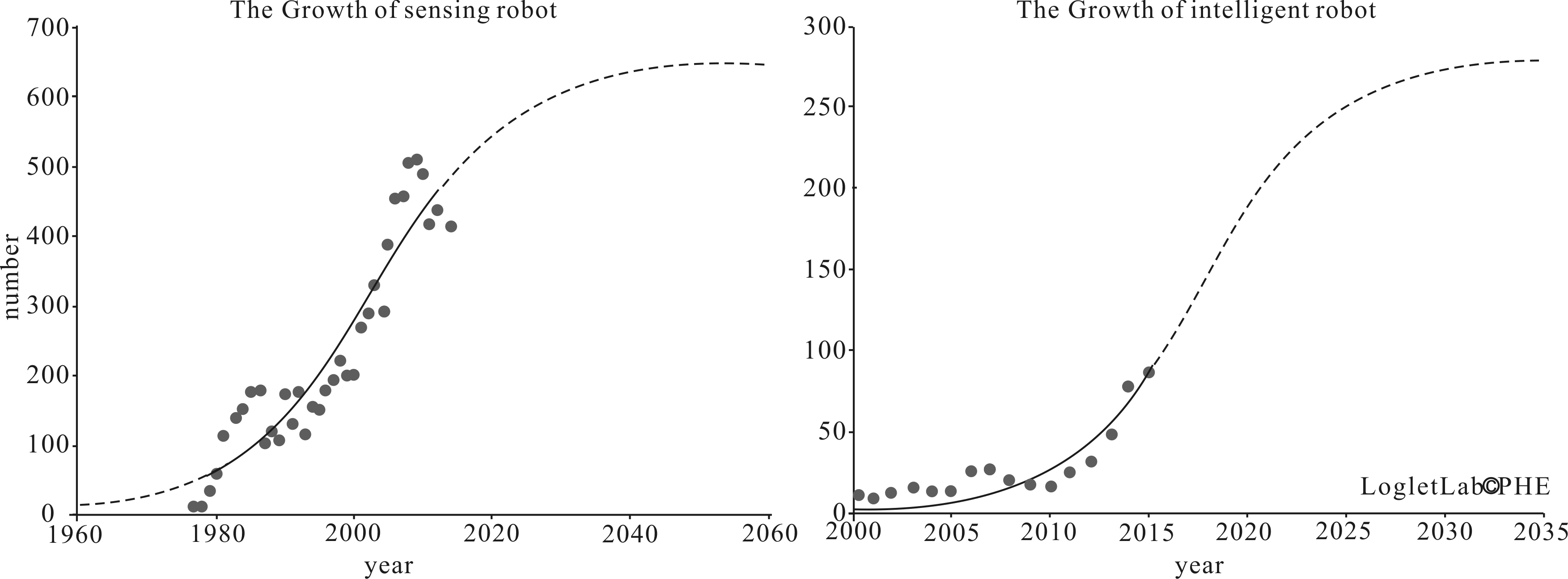
图3 感知与智能机器人专利数量发展趋势
其中,圆点代表实际专利件数,实线代表预测的专利件数,经曲线拟合求出两个技术领域的技术生命周期如表1所示。
表1 各技术领域技术生命周期(单位:年)

技术领域萌芽期成长期成熟期衰退期目前阶段感知机器人1976198820052022成熟期智能机器人2000201620232030萌芽期
如分析结果所示,感知机器人领域经过这些年的发展,技术逐渐成熟并受到了充分重视,目前处于成熟期,近几年发展趋势变缓甚至有一定的下降趋势,说明进一步发展的突破能力不足。智能机器人领域开始出现专利是在2000年前后,至今数量一直很少,目前处于技术萌芽期,且有上扬趋势。目前,两个技术处于新旧技术交替阶段,存在市场改变与技术发展的需要,意味着在智能机器人领域存在潜在颠覆性技术出现的可能性,虽然目前并未对市场产生重大影响,但是此阶段具有颠覆潜力的关键性技术可能已经出现,需要尽早识别。
一个专利通常通过多个国家或办事处申请,可以有多个等同专利,也就是专利家族。通常专利越重要,专利家族就越大,本文以专利家族为基准。利用Java编程程序对上述结果的创新性与独创性指标进行计算,得到各专利家族相应得分。
创新性指标可发现之前从未有过的技术成分与原理组合形成的专利,独创性指标协助找出将原有技术引入到新的技术领域中使用的专利,而不是对现有技术的部分改进。因此,创新性高、独创性低的专利可能只是新技术,独创性高、创新性低的专利可能只是技术跨领域扩散。由于技术在萌芽期并没有对市场产生影响,无法根据市场效果判断颠覆性技术,因而引入功能分析方法,通过分析上述技术中新的功能或商业模式,判断其对市场的潜在颠覆性。
在结果筛选中,若分析两性指标得分高的专利,则容易造成有颠覆潜力的技术被忽略,反之得到的专利数量太多容易干扰最终结果。经过反复尝试,确定筛选出两个指标得分均在0.5分以上的专利,共得到53条专利,部分结果如表2所示。
本研究对颠覆性技术的识别以经过筛选后的专利为数据源,经过两性指标筛选排除了渐进性创新的干扰,对结果的专利摘要文本进行自然语言处理,提取功能关键词。
表2 部分两性指标得分
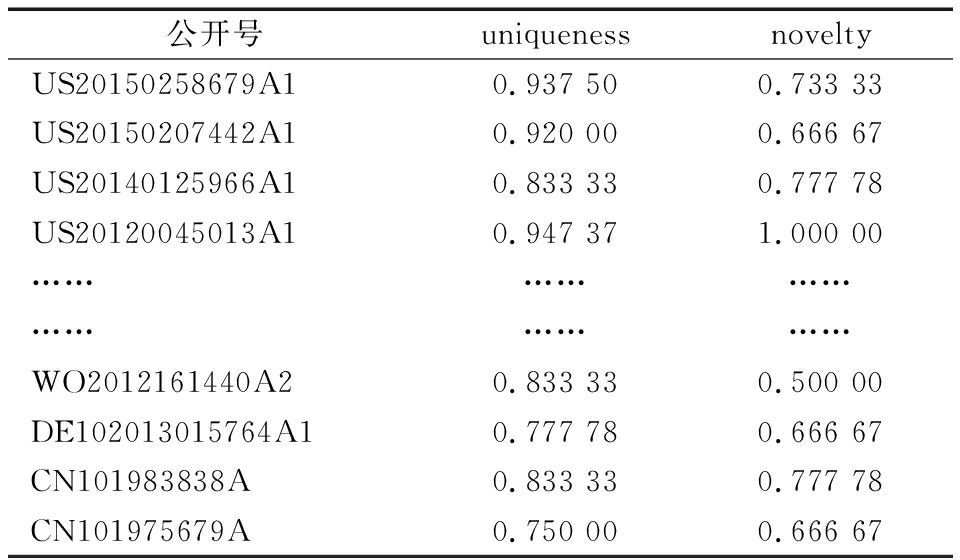
公开号uniquenessnoveltyUS20150258679A10.937 50 0.733 33 US20150207442A10.920 00 0.666 67 US20140125966A10.833 33 0.777 78 US20120045013A10.947 37 1.000 00 ………………………………WO2012161440A20.833 33 0.500 00 DE102013015764A10.777 78 0.666 67 CN101983838A0.833 33 0.777 78 CN101975679A0.750 00 0.666 67
3.3.1 技术关键词提取
运用自然语言处理方法,借助AlchemyAPI(http://www.alchemyapi.com/)平台提取功能,并基于Java环境提取专利摘要文本的AO(Action-Object)结构,清晰描述句子成分。一个专利摘要可以包含多个AO结构,对于初步提取的结果进行筛选,去除语义重复等无关结构,选出与专利主旨相关的AO结构,每篇专利最终的AO结构稳定在2~5个,作为提取功能词的基础。
由于传统技术关键词筛选需要大量解释工作,本文提出了一种快速识别新兴颠覆性技术功能关键词的方法。首先,从提取的AO结构中去除非功能词及一般描述性词语;其次,获取智能机器人2000-2007年的专利样本,并提取样本AO结构,作为智能机器人传统功能关键词;最后,在AO结构结果中去除2000—2007年出现的传统功能关键词,得到近十年来的新功能词。这种双重减法程序有助于快速找出新出现的功能词,不需要借助领域专家,普通人员也可以轻松进行筛选。部分功能词提取结果如表3所示。
表3 部分功能词提取结果
序号 功能词P1detects position of arm elementsP2improve portion speedP3performed correctly on display unitP4easily and quickly for new tasksP5carry out movements of specific portionsP6judges contact between robot and humanP7prevent collisions between user and parts of robot……P52calculated external forceP53facilitate direct physical interaction
3.3.2 功能分析结果
对于上述功能词的提取结果,本文借助JWS(Java WordNet Similarity)开源项目(http://www.cogs.susx.ac.uk/users/drh21/),利用Java语言实现计算实现AO结构相似度计算。本文使用的语义相似度算法是经典的Lin算法,公式如下:
Lin=2×IC(lcs)/(IC(synset1)+IC(synset2))
(4)
其中,lcs为同义词集1和同义词集2的公共包含数,IC为同义词集的信息量。
功能词相似度矩阵的部分结果如表4所示。
表4 部分功能词相似度矩阵
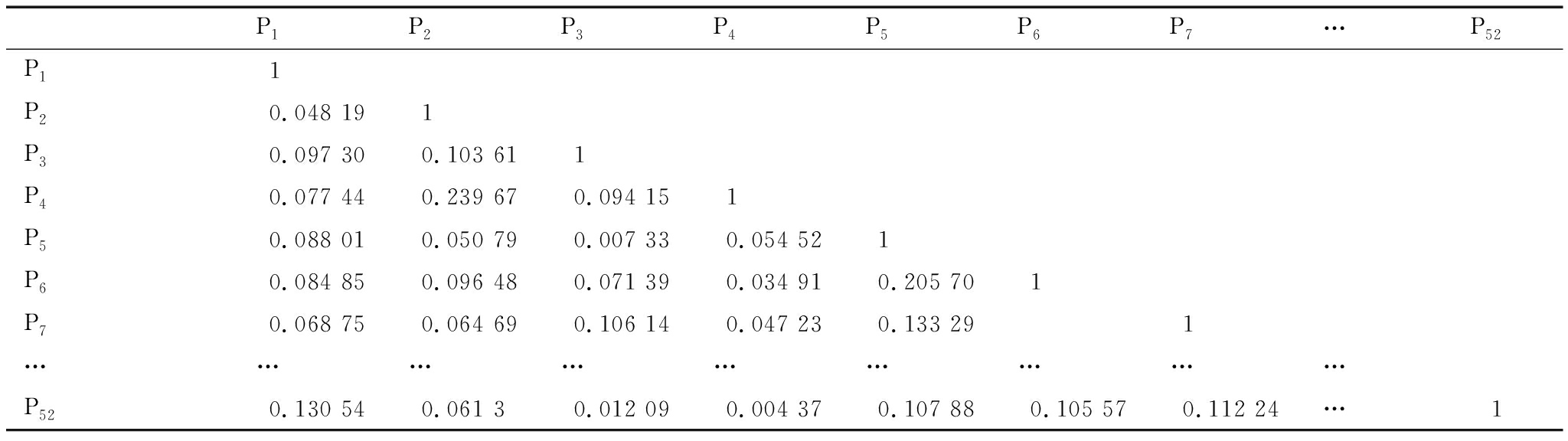
P1P2P3P4P5P6P7…P52P11P20.048 19 1P30.097 30 0.103 611P40.077 44 0.239 67 0.094 151P50.088 01 0.050 790.007 330.054 521P60.084 85 0.096 480.071 390.034 910.205 70 1P70.068 75 0.064 690.106 140.047 230.133 291………………………P520.130 54 0.061 30.012 090.004 370.107 880.105 570.112 24…1
将相似性矩阵导入SPSS软件,采用系统聚类方法,导出谱系图,得到8类聚类结果,经过分析尚有重叠部分。为了进一步分析它们之间的联系,利用多维尺度分析工具,合并邻近类别共得到6类结果,即工业机器人位置监测、碰撞保护、精度、效率、人机交互、操作方式,为了将聚类更加清晰,将结果进行可视化,如图4所示。
该功能图描述了未来可能颠覆智能工业机器人的功能词类别,通过对结果进行语义解读发现,未来可能的颠覆性方向有两个:
(1)良好的人机交互。在机器人的操作中不需要专业编程人员,工人仅需挪动它们的手臂向其展示运动路径,机器人记录相应的点和夹具操作进行重复运动,识别特定动作和手势。另外,机器人与工人直接在协同工作区实现互操作,机器人针对微小零部件和高精度部件进行组装或重复性工作,并提供任务执行反馈,由工人进行判断。人机协同工作也涉及到安全保护问题,嵌入式安全监测系统通过物理传感器计算外力模块,避免用户与机器人部位碰撞,达到人机并肩高效工作状态。位置监测系统可以在区域内定位用户与物体,将机器人运动速度控制在限定范围内,监测协同工作区域内各个部件与工人的距离,避免相距太近或产生碰撞。
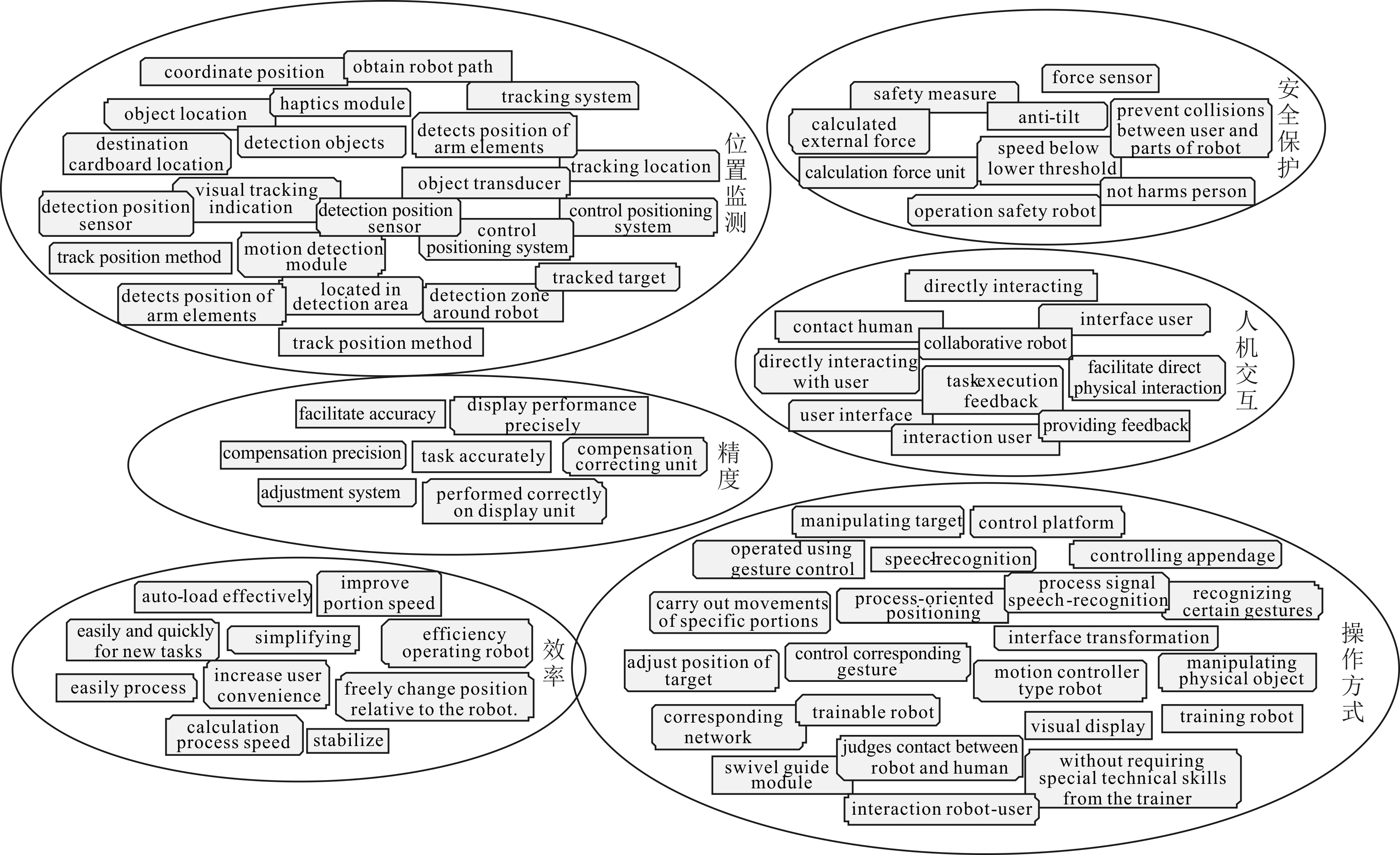
图4 智能机器人结果功能
(2)更高的定位与操作精度。位置监测可以进行精确定位操作,让机器人完成高精度组装。此外,机器人拥有高自由度的自适应手臂与多种夹具,可以灵活运转,以应对微小零部件组装。通过控制力传感器,操作机器人各特定部位,位置监测系统和精确视觉伺服可以精确反馈机器人各部位的具体位置,获取机器人路径,通过补偿纠正与调整系统对偏差进行纠正。
3.3.3 颠覆性影响分析
颠覆性技术为工业机器人领域带来新功能,但对于市场上的不同组织来说,由于业务方向不同,新技术带来的影响也不尽相同。选择代表性组织对由颠覆性变化带来的市场格局影响进行分析,对于不同类型的组织具有参考价值。在工业机器人市场中主要参与者有两方,组织A为工业机器人制造商,负责机器人制造与研发;组织B为各类制造企业,是工业机器人的购买方和使用方。
组织A需要考虑的是工业机器人的未来功能、生产技术和生产成本。目前,传统大型工业机器人技术已经比较完善,主要功能包括完成焊接、材料搬运以及大块头、大质量物品操作,这种重型设备在使用时需要有一系列安全措施将工人与机器的操作严格分开。在颠覆性技术中,人机安全交互协作的新功能为工业机器人使用提供了更多可能性。当前,工业机器人市场的主要业务是大型重工业机器人生产与销售,这类机器人的主要客户是传统大型重工业制造企业。而在销售市场中,这类企业只占据很小的部分,还存在大量中小型制造企业没有实现工业自动化,后者是工业机器人最大的潜在市场。人机协作的中小型机器人生产成本相对于大型机器人较低,随着技术发展,成本继续降低,届时拥有这类机器人技术与生产业务的生产商可以大规模量产与销售,进而占领目前被忽视的中小型制造企业市场,对以传统大型工业机器人为主营业务的在位企业实现颠覆。
对于组织B中的企业来说,机器人的使用对于传统制造企业的人员管理结构与生产方式产生巨大的冲击。其中,目前中小型制造企业多为人工化操作,随着将低价高效的机器人引入生产,生产高效与自动化阶段到来,该类企业必须抓住转型机会,固守传统低效的生产方式容易被市场淘汰。值得指出的是,在功能分析中发现,机器人生产关注高精度操作,未来随着机器人体积缩小与精度进一步提高,精密制造业方面可能会有机器人进入,取代目前繁琐的人工操作。
本研究提出了萌芽期颠覆性技术识别方法,从创新性、独创性与功能性3个特点入手,构建识别框架并采用工业机器人专利技术进行实证。本文主要贡献有:第一,现有颠覆性技术识别多在颠覆性效应产生后进行,与过去研究相比,本文采用的方法可在技术创新尚未对市场产生显著性变化时实现预警决策,为企业赢得早期研发布局的时机。第二,对工业机器人领域中颠覆性技术进行详细解析,未来发展方向有:人与机器可以方便高效地交互协作,共同完成工作;未来机器人注重灵活性与精度,以应对高精度和微小零部件组装。
本研究也存在一定的不足之处:只是依赖专利数据,具有一定的滞后性,并且是在颠覆性技术已经申请专利的假设前提下。同时,模型的有效性未得到更充分的实践验证。未来研究可采用已被证明的颠覆性技术、渐进性技术与未成功申请专利的技术进行对比验证,进一步提升方法的普适性与稳定性,并且以文献信息作为识别补充,使研究结果更加全面。
[1] BOWER J L, CHRISTENSEN C M.Disruptive technologies:catching the wave[J].Harvard Business Review, 1995, 73(1):43.
[2] DIXON T, EAMES M, BRITNELL J, et al.Urban retrofitting:identifying disruptive and sustaining technologies using performative and foresight techniques[J].Technological Forecasting & Social Change, 2014(89):131-144.
[3] CHRISTENSEN C.The innovator's dilemma:when new technologies cause great firms to fail[M].Harvard Business Review Press, 2013.
[4] CARLSEN H, DREBORG K H, GODMAN M, et al.Assessing socially disruptive technological change[J].Technology in Society, 2010, 32(3):209-218.
[5] MADS BORUP, NIK BROWN, KORNELIA KONRAD, et al.The sociology of expectations in science and technology[J].Technology Analysis & Strategic Management, 2006, 18(3-4):285-298.
[6] GANGULY A, NILCHIANI R, FARR J V.Defining a set of metrics to evaluate the potential disruptiveness of a technology[J].Engineering Management Journal, 2010, 22(1):34-44.
[7] SCHOENMAKERS W, DUYSTERS G.The technological origins of radical inventions[J].Research Policy, 2010, 39(8):1051-1059.
[8] GAMBARDELLA A, HARHOFF D, VERSPAGEN B.The value of European patents[J].European Management Review, 2008, 5(2):69-84.
[9] HALL B H, JAFFE A, TRAJTENBERG M.Market value and patent citations[J].RAND Journal of economics, 2005:16-38.
[10] MOMENI A, ROST K, PHILLIPS F.Identification and monitoring of possible disruptive technologies by patent-development paths and topic modeling[J].Technological Forecasting & Social Change, 2016, 104:16-29.
[11] CHEN C, ZHANG J, GUO R S.The D-Day, V-Day, and bleak days of a disruptive technology:a new model for ex-ante evaluation of the timing of technology disruption[J].European Journal of Operational Research, 2015, 251(2):562-574.
[12] BUCHANAN B, CORKEN R. A toolkit for the systematic analysis of patent data to assess a potentially disruptive technology[EB/OL]. https://www.researchgate.net/publication/265430234_A_toolkit_for_the_systematic_analysis_of_patent_data_to_assess_a_potentially_disruptive_technology, 2010.
[13] 黄鲁成, 成雨, 吴菲菲,等.关于颠覆性技术识别框架的探索[J].科学学研究, 2015, 33(5):654-664.
[14] 苏敬勤, 刘建华, 王智琦,等.颠覆性技术的演化轨迹及早期识别——以智能手机等技术为例[J].科研管理, 2016, 37(3):13-20.
[15] FOSTER R N.Working the s-curve-assessing technological threats (reprinted from innovation, 1986)[J].Research Management, 1986, 29(4):17-20.
[16] PHAAL R, FARRUKH C J P, PROBERT D R.Technology roadmapping——a planning framework for evolution and revolution[J].Technological forecasting and social change, 2004, 71(1):5-26.
[17] LEE K, LIM C.Technological regimes, catching-up and leapfrogging:findings from the Korean industries[J].Research Policy, 2001, 30(3):459-483.
[18] APREDA R, BONACCORSI A, DELL'ORLETTA F, et al.Functional technology foresight——a novel methodology to identify emerging technologies[J].European Journal of Futures Research, 2016, 4(1):13.
[19] 李春燕, 黄斌, LICHUNYAN,等.利用S曲线法判断3D打印工艺技术生命周期[J].科技与经济, 2017(2):91-95.
[20] ARTHUR W B.The structure of invention[J].Research Policy, 2007, 36(2):274-287.
[21] ARTHUR W B.The nature of technology:what it is and how it evolves[J].Penguin Books, 2009.
[22] FLEMING L.Breakthroughs and the "long tail" of innovation[J].Mit Sloan Management Review, 2010, 49(1):69-74+93.
[23] HARGADON A B.Brokering knowledge:linking learning and innovation[J].Research in Organizational Behavior, 2002, 24(02):41-85.
[24] 马磊, 宋建玮.IPC分类法在科技查新工作中的应用[J].图书馆学刊, 2012(3):32-34.
[25] VERHOEVEN D, BAKKER J, VEUGELERS R.Measuring technological novelty with patent-based indicators[J].Research Policy, 2016, 45(3):707-723.
[26] EGLI F, JOHNSTONE N, MENON C.Identifying and inducing breakthrough inventions:an application related to climate change mitigation[J].Oecd Science Technology & Industry Working Papers, 2015.
[27] Committee on Forecasting Future Disruptive Technologies (CFFDT). Persistent forecasting of disruptive technologies[EB/OL]. http://xueshu.baidu.com/usercenter/paper/show?paperid=ae7f0c3f4d489fe8581bc4f94353b467 &site=xueshu_se,2010.
[28] APREDA R, BONACCORSI A, DELL'ORLETTA F, et al.Functional technology foresight: a novel methodology to identify emerging technologies[J].European Journal of Futures Research, 2016, 4(1):13.
[29] ANNA BERGEK, STAFFAN JACOBSSON, BJÖRN A SANDÉN.'Legitimation' and 'development of positive externalities':two key processes in the formation phase of technological innovation systems[J].Technology Analysis & Strategic Management, 2008, 20(5):575-592.
[30] YOON J, PARK H, KIM K.Identifying technological competition trends for R&D planning using dynamic patent maps:SAO-based content analysis[J].Scientometrics, 2013, 94(1):313-331.
[31] 齐严.商业模式创新研究[D].北京:北京邮电大学, 2010.
[32] International Federation of Robotics.Executive summary world robotics industrial robots 2016 [EB/OL].https://ifr.org/free-downloads/.2016-10-12/2017-07-05.
[33] 中华人民共和国工业和信息化部.机器人产业发展规划(2016-2020年)[Z].2016-04-28.
[34] 李萍.专利已超6万件工业机器人时代如何专利布局[J].创新时代, 2015(9):32-34.
开放科学(资源服务)标识码(OSID):