图1 众包理念方案流程
目前,新的经济要素通过大数据、云计算、人工智能等核心技术融入各个领域。智能交通建设已从最初的概念化阶段,逐渐显现出巨大的发展潜力,这对城市交通基础设施转型升级提出了新要求。
国务院专门印发的《“十三五”现代综合交通运输体系发展规划》明确指出,“今后,交通领域发展应着力推进交通产业智慧化改革,推动云计算、大数据、移动互联网、物联网、智能控制等技术与交通领域深度融合,实现基础设施和运载工具数字化、网络化,运营运行智能化”。随着党的十九大明确提出建设“交通强国”的战略目标,以智慧化技术手段推动交通运输发生质量、效率和安全变革成为交通领域发展的重要导向。在这一目标导向下,智慧交通系统的安全问题显得尤为重要,而道路安全是交通安全的主要方面。
据调查,每年我国仅因路面问题造成的车辆损坏费用约为43亿元。由此可见,道路凹坑、颠簸和障碍物等道路异常是引起出行安全事故的主要因素之一。因为路面异常不仅会对车辆轮胎造成威胁,而且驾驶者发现路面问题后的突然避让、转向存在更大的安全隐患。
目前,我国路面异常情况检测主要采用人工勘察的方式。检测路面状况和驾驶行为的传感器系统仅安装在高端车型上,而国内的搜狗、高德、百度三大地图导航软件尚不具备路面异常状况检测功能,无法满足大众对道路检测的需求。然而,配有加速度计、磁强针、全球定位导航系统等传感器的智能手机可以用来采集路面的坑洞、障碍物等传感信息,这些信息在中央服务器中进一步分析,经过量化处理后以道路坑洞地图的形式传播,可以及时给使用手机的驾驶员和行人发出道路安全警告。
沿着这一方向,本文以智能手机为依托,提出了一种基于DTW算法和众包技术相结合的“智能巡逻”模型,用以检测道路异常情况,消除路面安全隐患。这一设想有助于人们准确识别道路坑洼、路面突然下沉等危害汽车安全行驶和行人安全出行的情况,及时示警,告知即将遇到的路面障碍以及如何躲避,以此实现“人、车、路”三者互联互通,为智慧交通建设提供了一种新的发展视角和实现模式。
近年来智慧交通快速发展,在国外智慧交通研究领域呈现出从解决交通拥堵问题到重视交通安全性能变化的趋势。Ren J[1]提出一种基于机器学习的凹坑检测系统,该系统利用基本阈值算法对路面状况进行检测,缩短了道路维修人员识别路面不良状况时间,便于路面坑洼检测和状态维护。Ghadge M[3]提出一种坑点检测系统,基于智能手机的加速度计进行坑洞探测,利用GPS在Google地图上绘制坑洞位置图,进而提高道路行驶安全性[2]。Limkar S 设计了一种基于Arduino传感模块和Android智能手机的坑洞检测方法,不仅可以探测路面坑洞,还能告知坑洞修复时间。Adewole K[4]基于机器学习技术,研发出一种能够实时、自动探测坑洞和监测道路交通状况的系统,通过智能手机加速度计和K-均值聚类方法采集尼日利亚路面数据,使道路交通可视化,提高交通安全性。
曹小曙[5]认为,缓解交通拥堵、提高居民出行效率、减少碳排放是我国智慧交通发展面临的关键问题,提出基于智慧交通可达性与碳排放的理论框架,并以广州为案例,研究了居民出行碳排放的特征及影响机理。黄大荣[6]设计了一种新的路网交通拥堵状态刻画模型,通过改进Dempster组合规则实现交通信息融合,以此推导出交通拥堵状态的准确值,最后对重庆市道路进行仿真分析,验证了该方法的实际应用价值。王宗尧[7]建立了一套分布式的智慧交通网络控制系统,该系统采用Multi-Agent技术构建城市交通预警机制和控制机制,并利用拉普拉斯矩阵对各条道路的交通流量进行均衡计算,以缓解交通资源分配不合理造成的交通拥堵。
从上述国外文献可以看出,大多数研究者采用机器学习技术检测道路凹坑状况,但这种基于数据挖掘和神经网络的道路异常检测方法需要广泛部署和大量学习与操作支持,可行性较差。相比之下,我国在路面异常检测方面还没有相关研究。为此,本文从DTW视角提出一种基于众包的道路异常检测新技术——“智能巡逻”,以发现路面凹坑、障碍物等异常问题,为国内相关研究提供一种新的思路。
Jeff Howe在美国《连线》杂志上首次提出众包的概念,即“一家公司或组织把过去由员工执行的任务,以自愿的形式交由网络大众的兼职工作模式。”众包的关键在于利用公开网络平台集聚的劳动力资源完成特定的工作任务。它作为一种群体智慧利用模式,已被广泛应用于宝马、汽车、宜家、阿迪达斯,欧莱雅等品牌的市场实践中[8]。同时,交通智慧化使得交通管理机制从职能管理向新型协调管理转变,公众参与和个性化服务成为智慧交通管理系统的核心内容[9]。在众包知识框架下,人们在不同时期扮演着信息使用者或贡献者的不同角色,他们产生的海量个人信息成为实现智慧交通公众参与和个性化服务的重要基石[10]。随着硬件和软件优化升级,智能手机可以作为多模式传感器,采集并分享各种类型的数据,以图片、视频等多种形式,传递位置、移动速度、方向以及加速度等信息。政府和个体通过手机实时获取、汇总与分析交通信息,进而实现对道路交通的有效控制[11]。
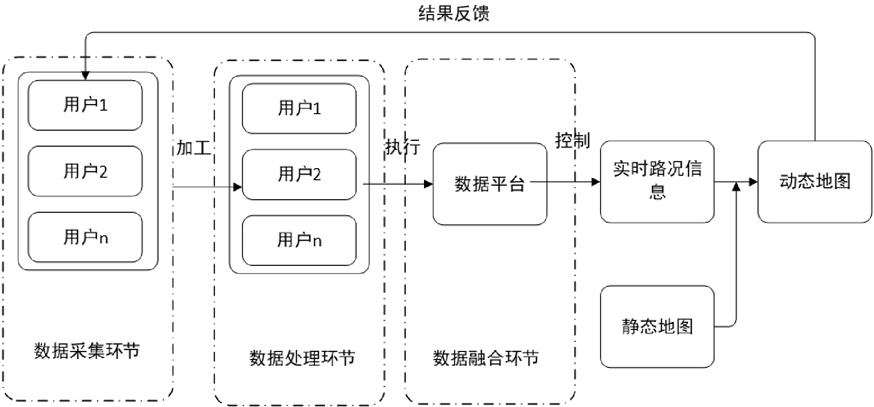
本文基于众包技术,提出智能交通构想:利用移动群体智能感知的理念,通过智能手机采集路面数据,并结合传感器数据,通过信息分析和融合平台,获得准确性更高、实时性更强的路面状况[12]。然后平台通过统一界面将路面动态分享到其它不同移动设备,形成一幅实时更新的众包地图,呈现在居民移动手机界面上[13]。基于众包理念的方案流程如图1所示。
图1 众包理念方案流程
DTW(动态时间规整算法)是一种动态模式匹配技术,可以度量任意两种模式在时间和空间上的相似性[14]。具体而言,计算两个时间序列之间的相似性及返回距离值,该值越低说明匹配性越好,距离越接近零表明序列越相似。采用DTW算法对收集的路面整体状况数据进行输出分析,然后将结果与存储的模板进行对比、套用,并与人工标记的实际异常情况的GPS点、假阳性率和假阴性率进行比较,计算出与模板参考匹配模式对应的异常点位置。DTW算法是一种无需固定阈值的方法,克服了现有技术的局限性,降低了算法的复杂性。
“智能巡逻”模型的设计思路主要包括:利用智能手机采集位置数据,通过噪声滤波服务器和DTW技术对数据进行分析;然后,将分析所得数据与参考模板数据进行对比并评分,检测与GPS位置对应的道路异常情况;最后,完成定位输出,从而掌握道路状况[15]。
这项工作的目标是使用智能手机检测路面异常状况,比如凹坑、颠簸和障碍物。本文设想,将“智能巡逻”模型应用于现有的地图APP中,当车辆在凹坑或颠簸路段行驶时,可以观察到与在平坦道路行上行驶数据的显著差异。这些读数由智能手机获得,并存储在APP软件中,也可以发送到数据云平台,供同样使用该应用的用户读取[16]。需要注意的是,当道路出现凹坑或颠簸等异常情况时,需要用户手动开启相应功能,以收集路面真实数据并完成数据实时共享,实现基层层面的“人、车、路”三者真正的互联互通。使用“智慧巡逻”模型检测路面异常机制如图2所示。
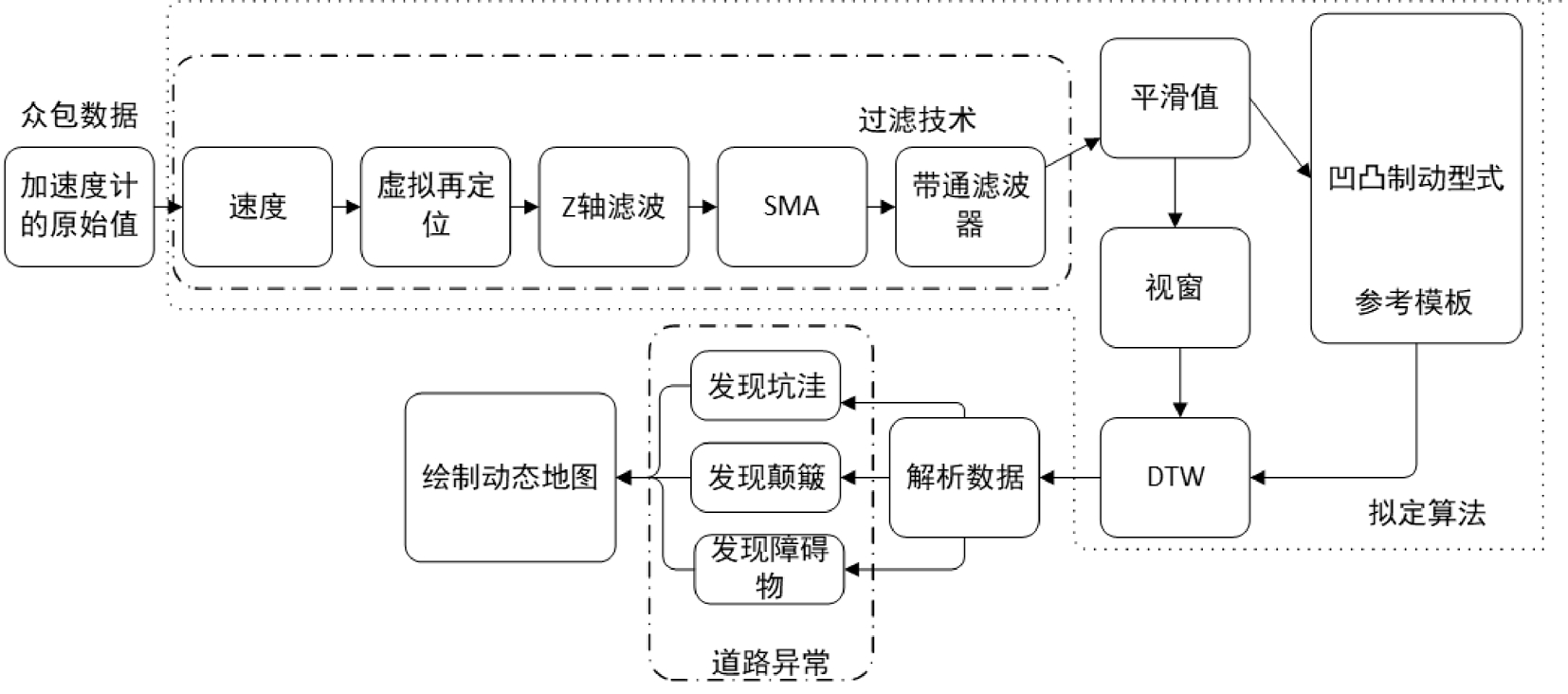
图2 “智能巡逻”检测模型
在“智慧巡逻”模型图中可以看到本文设计的模型运行过程:首先将加速度计的原始值输入滤波器中,对滤波后数据进行平滑处理,并将平滑后的数据保存到参考模板数据库中;然后将参考模板中的数据模式输入到DTW算法,该算法从数据中检测类似模式,实时采集以检测坑洞和凹坑等异常现象。每个过程的工作和说明如下。
“智慧巡逻”模型设想在智能手机上设计和安装一个APP软件(应用程序),该APP与智能手机内置的传感器进行交互。当用户坐在车内时,一旦遇到刹车或方向突然改变的问题,可以按下按钮,收集道路信息。这样,通过多用户自愿的形式搜集信息,并形成庞大的数据库,这些数据可进一步作为DTW算法定义道路异常状况的参考模板[17]。
智能手机中的加速度计传感器可以通过测量惯性力来检测沿着x、y和z轴3轴的线性加速度。加速度计沿x,y和z轴的加速度分别表示为ax、ay、az。x轴标识纵向方向,y轴标识横向方向,z轴标识与x、y平面的垂直方向。智能手机必须放置在车辆前行的方向上,才能确定车辆在通过坑洞或颠簸时所经历的加速度。如果智能手机没有面向车辆行驶方向,那么必须使用欧拉角对其进行物理重新定位。
欧拉角是一种将任何参考系的空间方位表示为3个元素旋转组合的方法[18]。在本文中,使用z-x-y序列,其中,围绕x轴的旋转可以用角度α(滚动角)表示,围绕y轴的旋转用β(俯仰角)表示,围绕z轴的旋转用γ(偏航角)表示[19]。理想情况下,加速度计的值在静止不动的仪表板上,表示为:
ax = 0 m/s2,ay = 0 m/s2,az = 9.81 m/s2
通常情况下,沿三轴的重定向加速度可表示为:

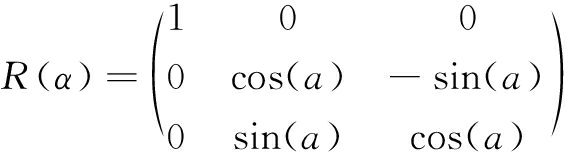
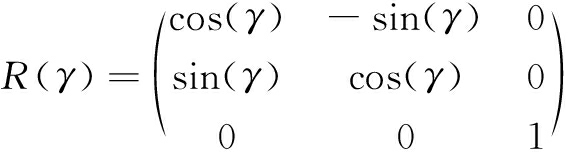

因此,可以得到加速度的重定向![]()

(sin(γ)cos(β)+cos(γ)sin(β))Y-(cos(α)sin(β))Z

a′z=(cos(γ)sin(β)+sin(γ)sin(α)cos(β))X+
(sin(γ)sin(β)-cos(γ)sin(α)cos(β))Y+
(cos(α)cos(β))Z
加速度计的原始值包括重力分量和车辆的振动。为了准确地把握其它外力的影响,需要从加速度计数据中剔除这部分内容。本文利用速度、虚拟重定向、滤波z轴、SMA和带通滤波器修正加速度的原始值。
(1)速度。如果车辆静止,加速度计不会产生明显的读数变化。这些值需要在数据处理前予以剔除。否则会导致总执行时间和存储空间更长。本文使用智能手机的GPS传感器计算车辆速度,若速度小于5 km/h,相关分数据予以剔除。
(2)虚拟定位。采用欧拉角方法对加速度的原始值进行虚拟定位,避免观测数据值受智能手机所处车内位置的影响。
(3)滤波Z轴。在加速度计传感器的虚拟重定向后,由于凹坑和凸起等异常现象只影响z轴数据值,因此只需考虑沿z轴方向的值(重定向),剔除沿x和y轴的值。
(4)SMA(简单移动平均法)。SMA不仅可以平滑加速度计的值,还可以消除因车辆振动产生的噪声数据。SMA是一种以某一数据序列的平均值为计算对象的算术移动平均。
(5)带通滤波器。加速度计传感器有时会收集到自身硬件噪声,必须对这些值归一化或消除,而数据平滑主要由低通和高通滤波器完成。其中,低通滤波器用于传递低频信号,降低频率高于阈值的信号的幅度;高通滤波器用于传递高频信号,降低频率低于阈值频率的信号幅度。在对加速度计z轴(方向)进行滤波后,采用带通滤波器消除数据中的噪音。
在“智慧巡逻”模板中,首先对采集到的全部数据进行分析,得到DTW算法的输出结果。然后,通过与存储模板的对比,找出路面异常情况相似的模板,并与人工标记的实际凹坑、障碍物的GPS点、假阳性率和假阴性率进行比较。最后,计算出与参考模板匹配模式对应的位置。
加速度计采集的数据值经不同的过滤器处理后,被平滑化并保存。需要注意的是,路面异常状况相对应的加速度计读数被提取并保存到一个名为“模板引用”的模式数据库中,其中模板引用选择是最重要的步骤之一。在基于DTW的时间序列识别应用中,本文采用一种简单方法制备可靠的模板,以提高事件检测率。基于DTW算法的事件检测系统精度很大程度上取决于制备的参考模板质量。在选择参考模板时,首先选择一个样本,然后根据另一个样本测试数据测试其识别率。
本研究在太原市区不同道路上,利用汽车和智能手机采集加速度计和GPS数据,利用 DTW技术对路面异常状况进行为期1个月的监测,发现DTW技术对路面异常情况的平均检测率高达88.66%,DTW和众包技术相结合的路面检测方法具有较高的准确性。具体情况如表1所示。
表1 案例实证基本信息

因素考虑参数使用技术DTW和众包技术试验地点太原市区路面智能手机操作系统平台Android用于数据收集的设备智能手机(华为、小米)使用的车辆本田加载点前排仪表板(驾驶员、副驾驶),后座检测目的路面异常情况
本文提出了一种基于众包技术与DTW算法相结合的“智能巡逻”模型,用以识别道路凹坑、路面下沉或障碍物等危及车辆安全的路面异常情况。该模型可以对道路障碍提前预警并给出避让建议,进而实现“人、车、路”互联互通。研究表明,利用众包技术、智能手机加速度数据流及DTW算法,可以提高路面异常检测的准确性。DTW算法在比较不同的速度与时间数据变化方面具有高精度和高效率的优势[20],与机器学习和基于阈值的技术相比,其操作更为便捷。此外,实验数据表明,“智慧巡逻”模型对路面异常情况的平均检测率高达88.66%,优于既有技术。因此,本文提出的模型具有较好的路面检测精度,为我国未来道路检测和交通智慧化研究与实践提供了一种新的发展视角和实现模式参考。
[1] REN J, LIU D. Pads: a reliable pothole detection system using machine learning[J]. International Conference on Smart Computing & Com,2016:327-338.
[2] GHADGE M, PANDEY D, KALBANDE D. Machine learning approach for predicting bumps on road[C].International Conference on Applied and Theoretical Computing and Communication Technology, IEEE, 2016.
[3] LIMKAR S, RAJMANE O, BHOSALE A, et al. Small effort to build pune as a smart city: smart real-time road condition detection and efficient management system[M].Smart Computing and Informatics,2018.
[4] AKINWANDE V, ADEWOLE K, BELLO O, et al. Automatic and real-time pothole detection and traffic monitoring system using smartphone technology[C].International Conference on Computer Science Research and Innovations,2015.
[5] 曹小曙,杨文越,黄晓燕.基于智慧交通的可达性与交通出行碳排放——理论与实证[J].地理科学进展,2015,34(4):418-429.
[6] 黄大荣,柴彦冲,赵玲,等.考虑多源不确定信息的路网交通拥堵状态辨识方法[J].自动化学报,2018,44(3):533-544.
[7] 王宗尧.分布式智能交通网络流量预测与控制系统[J].系统工程,2016,34(3):101-110.
[8] SINGH G, BANSAL D, SOFAT S. A smartphone based technique to monitor driving behavior using DTW and crowdsensing[J]. Pervasive & Mobile Computing, 2017(2).
[9] HUANG S, ZHANG F, YU R, et al. Turnout fault diagnosis through dynamic time warping and signal normalization[J]. Journal of Advanced Transportation, 2017(2):1-8.
[10] ENGELBRECHT J, BOOYSEN M J, ROOYEN G J V, et al. Performance comparison of dynamic time warping (DTW) and a maximum likelihood (ML) classifier in measuring driver behavior with smartphones[C].2015 IEEE Symposium,2015:427-433.
[11] MATARAZZO T J, SANTI P, PAKZAD S N, et al. Crowdsensing framework for monitoring bridge vibrations using moving smartphones[C]. Proceedings of the IEEE, 2018.
[12] LI C, GONG S, WANG X, et al. Secure and efficient content distribution in crowdsourced vehicular content-centric networking[J]. IEEE Access, 2017,123.
[13] 张晓旭.基于Crowdsourcing的路况信息收集系统及相关隐私安全问题研究[D].长春:吉林大学,2016.
[14] 王玉珏.基于VQ/DTW的列车运行数据健康管理[D].北京:北京交通大学,2015.
[15] 崔倩倩.一种基于众包地图的智能交通诱导数据模型及方案研究[D].北京:北京邮电大学,2015.
[16] HU S, SU L, LIU H, et al. Smartroad: smartphone-based crowd sensing for traffic regulator detection and identification[J]. Acm Transactions on Sensor Networks, 2015,11(4):55.
[17] LI X, GOLDBERG D W. Toward a mobile crowdsensing system for road surface assessment[J]. Computers Environment & Urban Systems, 2018(8).
[18] KARPOV A D, ZHILENKOV A A. Designing the platform for monitoring and visualization orientation in eulerangles[C].Electrical and Electronic Engineering,2017:301-305.
[19] MIAO J, SHAO Q, REN Y. Coordinate rotation transformation method based on ternary angle[J].Journal of Beijing University of Aeronautics & Astronautics, 2017,43(12).
[20] ZHAO J, ITTI L SHAPE.DTW: shape dynamic time warping[J]. Pattern Recognition, 2017,74.