表1 原始专利地图分类
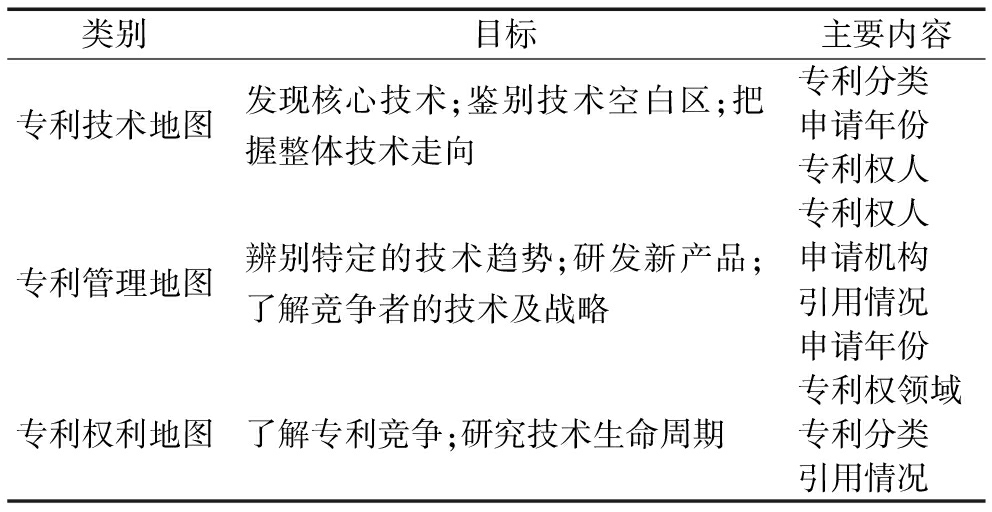
类别目标主要内容专利分类专利技术地图发现核心技术;鉴别技术空白区;把握整体技术走向申请年份专利权人专利权人专利管理地图辨别特定的技术趋势;研发新产品;了解竞争者的技术及战略申请机构引用情况申请年份专利权领域专利权利地图了解专利竞争;研究技术生命周期专利分类引用情况
摘 要:以工业机器人产业为切入点,以德温特专利数据库为检索范围,利用TDA、Matlab等软件全面挖掘工业机器人专利数据,绘出中国工业机器人产业专利地图,分析中国工业机器人专利申请年份、机构、技术分布现状、专利技术周期以及与世界周期的差异,可为中国工业机器人专利布局提供可靠的产业技术情报。
关键词:工业机器人;专利地图;专利技术;生命周期
随着“工业4.0”时代的到来,中国制造业已经走到转型升级的拐点。作为制造业皇冠上明珠的工业机器人迅速成为时代新宠儿,各个国家正积极发展自身的工业机器人产业,迎接“无人工厂”、“数字生产”时代的到来。因此,研究工业机器人产业专利对中国实施“工业4.0”战略有着重大意义。工业机器人是面向工业领域的多关节机械手或多自由度机器装置,它能自动执行工作,是靠自身动力和控制能力实现各种功能的一种机器。Conigliaro L[1]较早地预测了机器人的发展趋势并分析了机器人产业现状;Whitney D E、Lozinski C A和Rourke J M.[2]提出了工业机器人的前行校正方法;Asada M、Ishiguro S.[3]对下一代机器人产业趋势作出了预测。
专利文献挖掘是当今学术领域研究的热点方向之一,内容具有及时性、详尽性等特点。专利文献的作用已被广泛认可,主要体现在以下方面:首先,能降低新技术研发成本;其次,能够丰富技术创新内容;再次,可降低技术研发过程中产生的沉没成本,最后,专利文献提供的情报信息可以作为政策制定的风向标。随着研究的深入,专利文献挖掘形成了相对固定的研究框架,这个框架即是专利地图。
专利地图的研究可以追溯到20世纪60年代,由日本最先研发。后来,出于国家科技战略以及产业研究需要,各个国家纷纷开始研究专利地图。随着研究的深入,专利地图的种类发展呈多样化趋势,并且用途实现多样化。微观层面上,许玲玲[4]提出利用专利文献对企业竞争对手进行分析,从识别竞争对手、掌握竞争对手技术特征、推断竞争对手市场策略3个方面全面分析竞争对手。杨薇炯[5]提出专利地图对于企业专利战略的重要性,并给出企业如何根据专利地图制定专利布局战略的方法论。中观层面上,王珊珊、田金信[6]提出研发联盟的概念,其本质是协同创新,并首先提出研发联盟战略分析与定制流程图,同时构建了研发联盟专利战略框架。宏观层面上的研究更为广泛,学者们[7-10]分别从不同行业的专利情报入手,分析该行业现状及未来发展趋势,为国家科技创新战略提供了大量情报信息。
本文将专利地图理论与工业机器人产业相结合,将专利地图的研究框架应用于工业机器人产业专利,挖掘出工业机器人产业技术专利情报并提出政策建议。
在研究工具上,有两项重要工作,一是数据库选择,二是分析工具选择。国内研究的数据来源通常包括国家知识产权局数据库、德温特专利数据库、世界知识产权数据库等。专利文献分析工具具有多样性,常见的分析工具有Excel、TDA、Citespace、Network、SQL。Excel可用来作简单的统计分析、TDA用来作比较深入且复杂的统计分析,例如生成同现矩阵、相关系数矩阵、热点技术分析等。Citespace和Network的用途在于能体现专利文献的相互引用关系,具体包括作者、关键词的相互引用,是专利信息引用关系可视化的一种便捷工具。
目前应用最广泛的是Yoon B U、Yoon C B以及Park Y T[11]提出的专利地图研究框架,具体内容见表1。专利地图框架所包含的内容有:专利分类(即专利的IPC分类)、申请年份、专利权人、申请人、申请机构、引用状况、专利领域,这些内容均可从德温特专利数据库的对应字段中找到相应信息。
表1 原始专利地图分类
类别目标主要内容专利分类专利技术地图发现核心技术;鉴别技术空白区;把握整体技术走向申请年份专利权人专利权人专利管理地图辨别特定的技术趋势;研发新产品;了解竞争者的技术及战略申请机构引用情况申请年份专利权领域专利权利地图了解专利竞争;研究技术生命周期专利分类引用情况
根据德温特专利数据库的文献结构,对Yoon B U的专利地图分类作部分调整。
(1)对三大类包含的内容进行调整。首先,考虑到专利技术地图与专利管理地图存在部分内容重合,需要对此部分进行删减。例如在专利技术地图和专利管理地图中,“专利权人”和“申请年份”两项是重复项,需要删除;其次,德温特专利数据库的专利文献涉及内容更加多样化,例如申请国家、德温特分类号、相关引用专利号、引用作者等,因此需要对“专利权人”进行细化,细化到“申请国家”、“申请机构”;最后,根据德温特数据库的现有文献结构,对文献信息进行二次处理。例如,对专利申请数量的年份分布数据进行拟合,得出技术生命周期。需要指出的是,技术生命周期是专利情报信息的关键内容之一。
(2)对专利地图类别的划分进行重新调整。第一类的“专利技术地图”涉及的程度及主要内容均是专利数据库挖掘出的直接信息,不需要作深层次数据处理,第三类的“专利权领域”、“专利分类”也属于直接信息,可以将直接挖掘出的信息归为一类。另外,根据德温特数据库结构特征,加入“申请机构”、“申请国家”。第二类的“专利管理地图”要实现的目标是辨别特定的技术趋势、研发新产品、了解竞争者的技术及战略,而“专利权人”、“申请机构”、“申请年份”均属于基本专利信息,从中不能找到技术趋势等情报,根据德温特数据机构,技术趋势可以从专利间的相互引用关系中找到;第三类的“专利权利地图”的目标之一是研究专利技术生命周期,而专利技术生命周期是专利技术趋势的时间维度,因此直接放入第二类,另一目标是了解专利竞争,这一目标在第一类中已经实现,是重复内容,因此将第三类删除。重新建立的专利地图框架见表2。
2.1 工业机器人专利文献来源
专利文献的来源具有多样性,全球大部分国家均会建立属于本国的专利数据库,如中国的国家知识产权局、美国专利商标局、日本国家专利局、世界知识产权组织等。本文专利文献的来源是德温特专利数据库(简称DII),该数据库信息来源于全球40多个专利机构,信息较完整。数据库由各个行业的技术专家对全球主要专利机构的专利文献进行翻译整理,重新编写专利信息,如描述性的标题和摘要、新颖性、技术关键、优点等,将专利文献机构标准化,成为专利文献信息挖掘的重要来源。
德温特专利数据库的专利信息包括专利名称、摘要、专利申请人、国家、国际分类号、德温特分类号、德温特手工代码、专利权人名称、专利权人代码、优先权申请日期等,除此之外,还将在不同国家申请的同一项专利聚在一起,形成同族专利。
德温特数据库的检索方法简单明了,主要分为以下步骤:首先,确定检索式,检索方式包括“主题”、“IP”(国际专利分类号)等字段,这些字段均是专利文献信息中包含的。除此之外,还有逻辑词“and”、“or”、“not”三类,在检索时可以同时使用三类逻辑词。
2.2 工业机器人专利检索
对于工业机器人而言,其主题或者关键词应该是robot。由于机器人包括的内容过于广泛,例如服务机器人、医疗机器人、救灾机器人等,因此需要根据工业机器人的关键技术进行排除。识别工业机器人关键技术是进行专利检索的前提,根据前文对工业机器人定义的分析,参考国家知识产权局发布的报告内容可以明确,工业机器人的关键技术专利大都分布在航道控制、自动控制、传输、多铰接爪臂、电弧焊机、机械加工臂、机械手、自动传输、喷涂等技术上[12]。根据以上内容,并通过仔细阅读专利国际分类号能判断出,工业机器人专利的国际分类代码主要出现在国际分类号的B部(作业、运输)和G部(物理)。
表2 改进后的专利地图分类
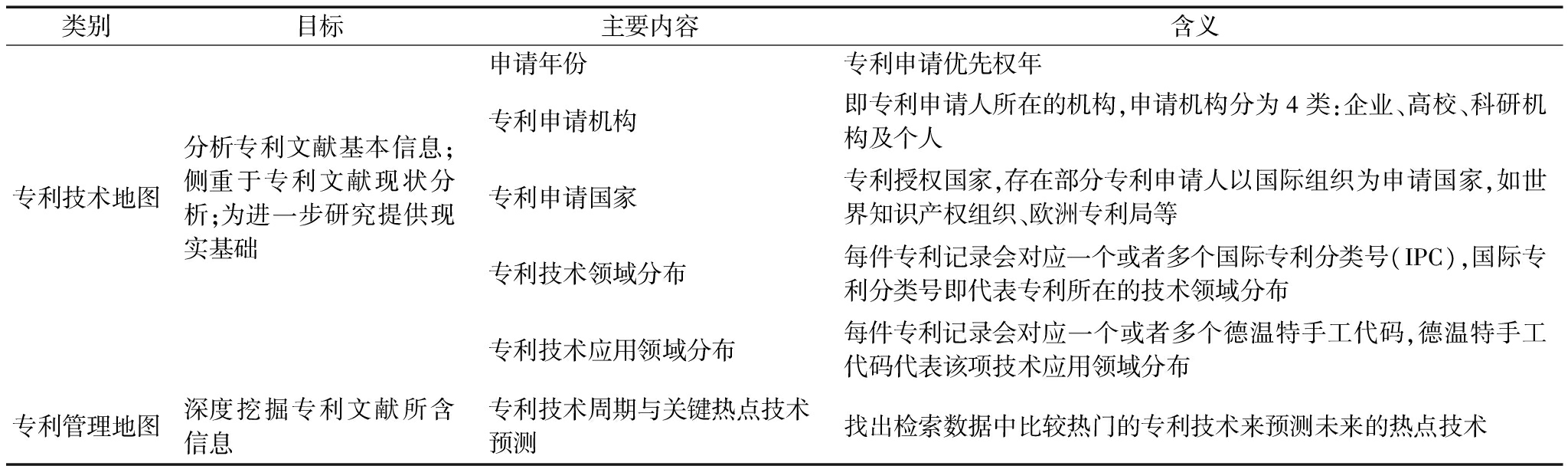
类别目标主要内容含义申请年份专利申请优先权年专利申请机构即专利申请人所在的机构,申请机构分为4类:企业、高校、科研机构及个人专利技术地图分析专利文献基本信息;侧重于专利文献现状分析;为进一步研究提供现实基础专利申请国家专利授权国家,存在部分专利申请人以国际组织为申请国家,如世界知识产权组织、欧洲专利局等专利技术领域分布每件专利记录会对应一个或者多个国际专利分类号(IPC),国际专利分类号即代表专利所在的技术领域分布专利技术应用领域分布每件专利记录会对应一个或者多个德温特手工代码,德温特手工代码代表该项技术应用领域分布专利管理地图深度挖掘专利文献所含信息专利技术周期与关键热点技术预测找出检索数据中比较热门的专利技术来预测未来的热点技术
本文采用的逻辑词如下:ts=(robot) not ip=a* not ip=a* not ip=c* not ip=d* not ip=e* not ip=f* not ip=h* not ip=b01* not ip=b08* not ip=b09* not ip=b31* not ip=b60* not ip=b62* not ip=b63* not ip=b64* not ip=b66* not ip=b67* not ip=b41* not ip=b42* not ip=b43* not ip=b44*。
同时,时间跨度选择也是专利检索的考量因素。本研究专利的检索日期是2015年8月20日,时间跨度指的是专利优先权日期,本文的日期范围选择的是“-2015”。值得注意的是德温特数据文献收录具有一定滞后性,滞后期大约为18个月,这是由于德温特研究所的研究人员需要花时间重新编辑或者翻译专利信息,因此比较完整的数据应是截止到2012年。截止检索日期2015年,各国政府会对专利库进行更新,可能导致某些专利被剔除、修改或增加,2015年和2014年的专利数据存在不完整性,但有选择地使用各年份数据不会影响结论。
本文将根据专利地图框架对中国工业机器人产业专利地图进行分析,通过阐述中国工业机器人产业优先权年分布、专利权人、关键技术、应用领域4个方面的专利技术现状,为中国工业机器人的专利布局提供可靠的产业技术情报。
3.1 专利申请优先权年分布
由图1可知,中国的专利申请量呈现稳定高速增长态势,尤其在2010、2011年之后专利申请量突破1 000件。截至检索日期,专利数量为6 917件,占总量的22.47%。中国第一项工业机器人专利的申请时间为1984年,申请量为1件,在随后10年专利申请进度缓慢,部分年份零申请;1994年后专利申请逐步走向持续发展阶段,年零申请情况消失,每年都会有新的专利申请,且申请数量逐渐增长;2005年后,申请量以更快的速度增长,专利申请量从2006年的140件增长到2013年的1951件。
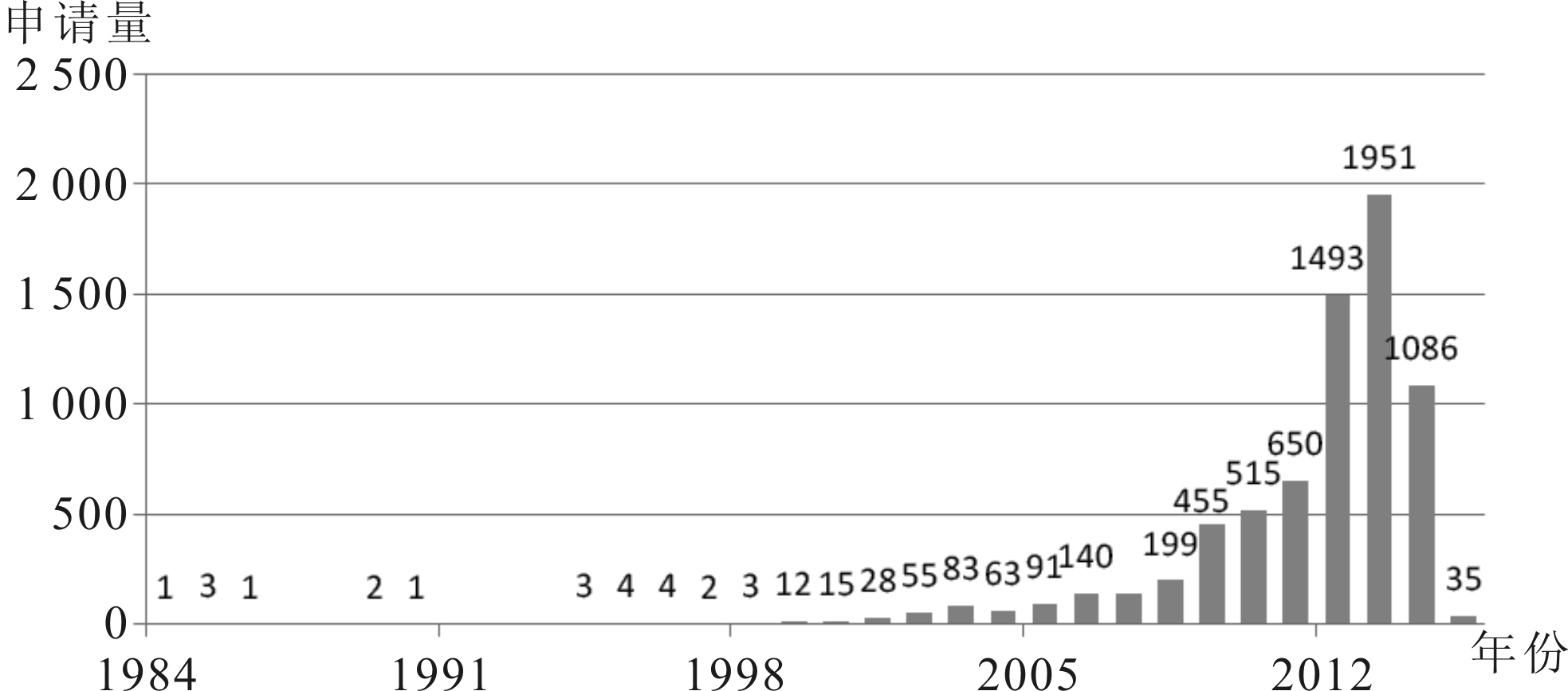
图1 中国专利申请数量年份分布
3.2 专利申请机构分布
通过对专利权人的统计分析,可将中国的专利权人分为四类:高校、研究所、企业、个人。高校专利申请数量占总量的29.56%,研究所申请数量占总量的5.39%,企业申请数量占54.23%,以个人名义申请的占总量的10.82%;平均每个高校申请专利的数量是10.4件,平均每个研究所申请专利的数量是4.067件,平均每个企业申请专利的数量是2.91件,平均每个个人申请专利的数量是2.53件(见表3)。
表3 中国专利权人分类
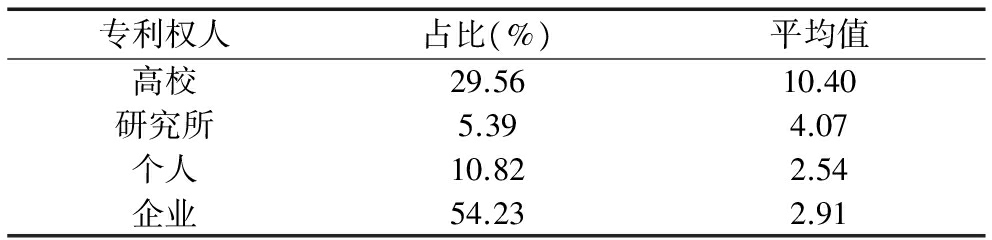
专利权人占比(%)平均值高校29.5610.40研究所5.394.07个人10.822.54企业54.232.91
对中国专利权人的申请量进行排名,前15名排名情况见表4,其申请专利数量总和占到全国总量的18.75%。申请机构中,高等院校及研究所占绝对优势,清华大学、上海交通大学、北京科技大学在高等院校中位列前三,而企业仅仅包括鸿富锦精密工业、国家电网、鸿海精密工业、沈阳新松机器人4家公司,4家公司的专利申请量占前15名总量的24.8%。
表4 国内专利申请机构分布
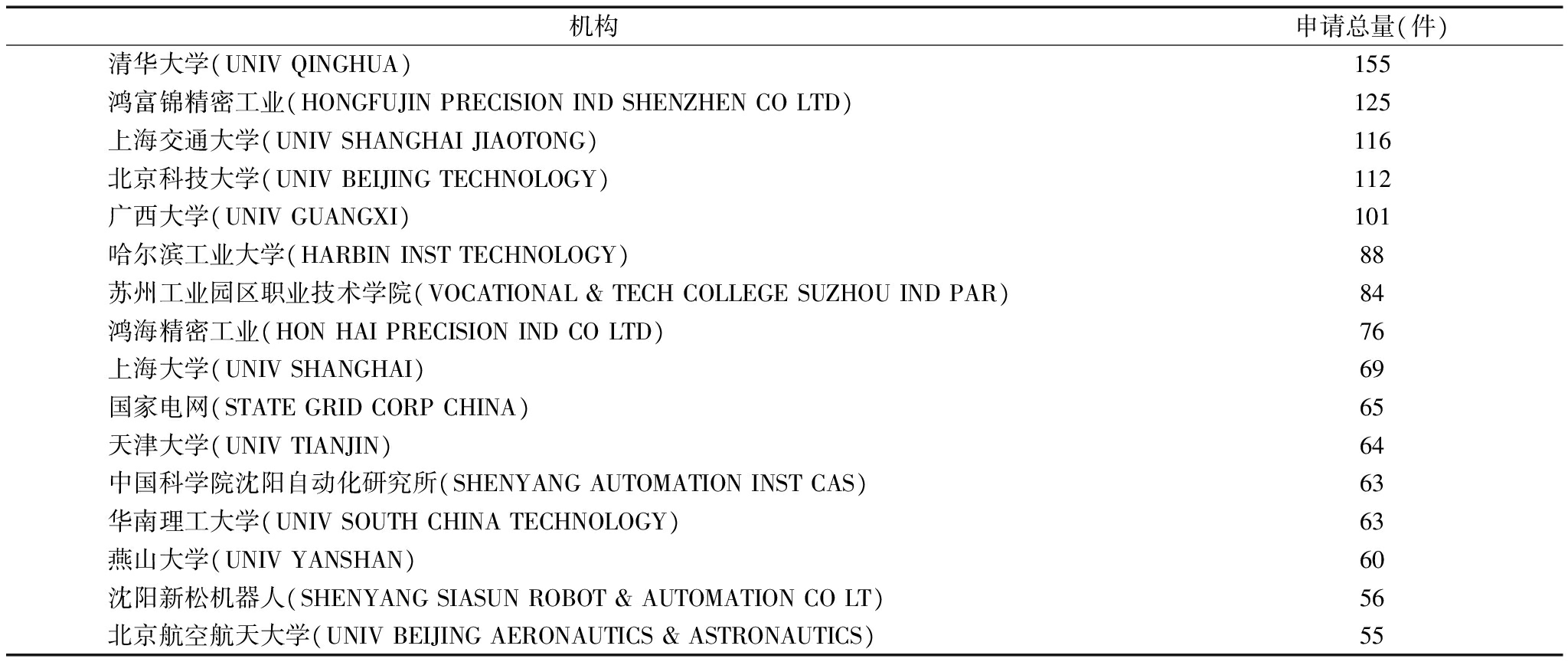
机构申请总量(件)清华大学(UNIVQINGHUA)155鸿富锦精密工业(HONGFUJINPRECISIONINDSHENZHENCOLTD)125上海交通大学(UNIVSHANGHAIJIAOTONG)116北京科技大学(UNIVBEIJINGTECHNOLOGY)112广西大学(UNIVGUANGXI)101哈尔滨工业大学(HARBININSTTECHNOLOGY)88苏州工业园区职业技术学院(VOCATIONAL&TECHCOLLEGESUZHOUINDPAR)84鸿海精密工业(HONHAIPRECISIONINDCOLTD)76上海大学(UNIVSHANGHAI)69国家电网(STATEGRIDCORPCHINA)65天津大学(UNIVTIANJIN)64中国科学院沈阳自动化研究所(SHENYANGAUTOMATIONINSTCAS)63华南理工大学(UNIVSOUTHCHINATECHNOLOGY)63燕山大学(UNIVYANSHAN)60沈阳新松机器人(SHENYANGSIASUNROBOT&AUTOMATIONCOLT)56北京航空航天大学(UNIVBEIJINGAERONAUTICS&ASTRONAUTICS)55
申请单位以高等院校及研究所为主体,一方面说明本土企业缺乏专利布局观念,申请专利的积极性不高,另一方面说明本土企业研发强度不够,没有投入充足的人力、物力、财力从事技术创新活动,而高校具备人才、技术和科研经费优势,技术创新活动相对频繁。根据欧盟委员会发布的全球企业研发投入排名情况,2012年世界前50名企业中尚未见到中国企业的身影。虽然高校的专利申请数量可观,但将其广泛应用于工业生产过程即实现商业化仍需要一段时间。
3.3 专利关键技术识别
对中国所有申请专利的IPC小类进行分类统计,得出排名前20位的IPC小类,如表5所示。专利申请量分布最多的IPC分类号是B25J和B23K,分别占总量的52.46%和15.52%,其它小类占比较小。
表5 中国IPC小类分类分布及含义
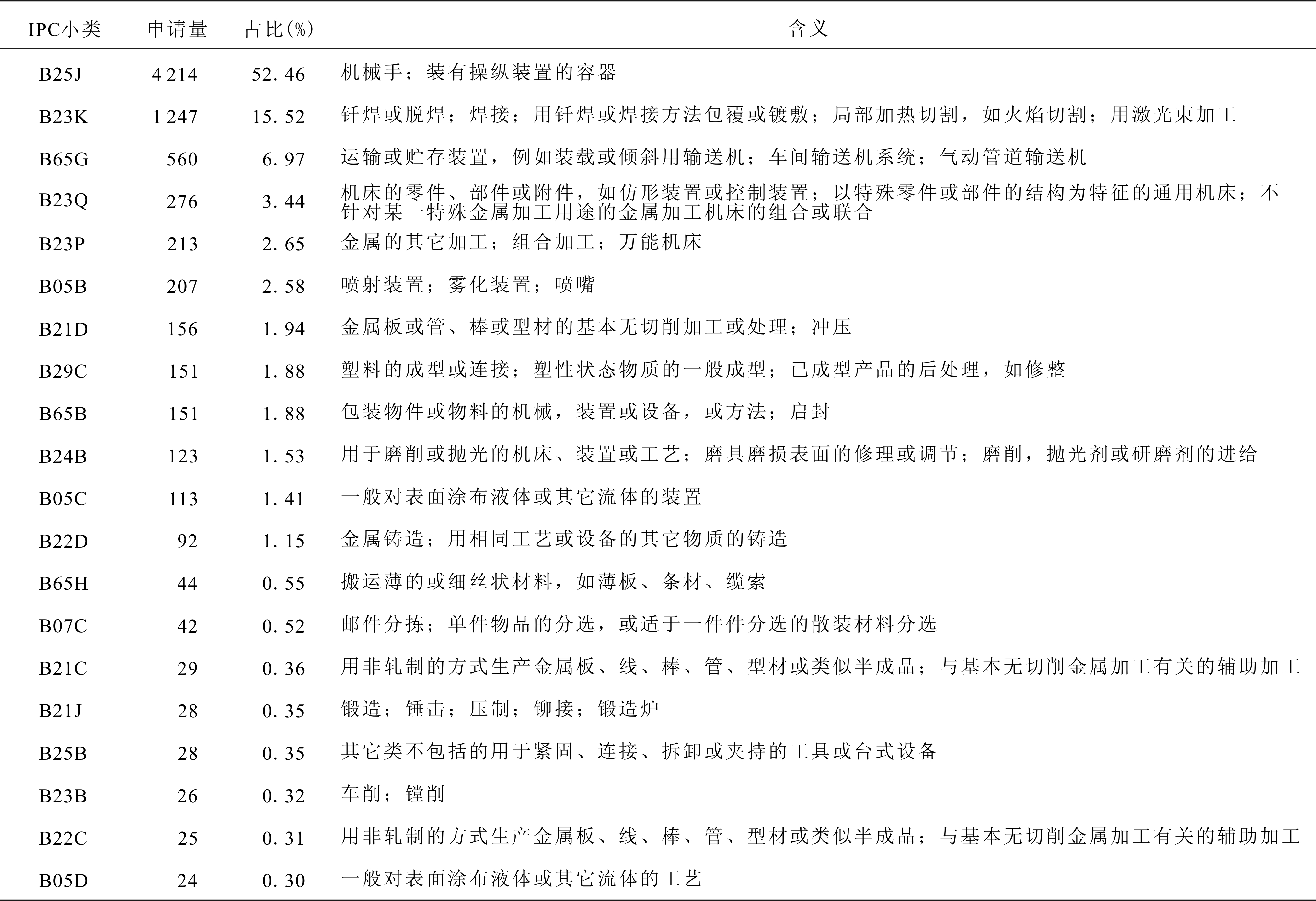
B25J申请量在2012年及以后呈井喷式增长态势,2012年相比2011年,增长率高达122.2%。B25J小类中主要包括的IPC小组有:B25J-009/08;B25J-019/00;B25J-009/00;B25J-011/00;B25J-013/0;B25J-009/16;B25J-017/00。
B23K申请量爆发的年份是2012年,相比于2011年,年增长率为151.5%,主要包括的小组有B23K-037/02;B23K-037/04;B23K-037/047;B23K-009/12;其次是B65G,占总量的6.97%,主要包括的小组有B65G-061/00;B65G-047/90;B65G-047/91;B65G-057/00。
表6描述了将专利申请量的IPC小类按年份分解后的情况,可以发现,部分技术小类在近些年才开始出现申请,对这些早期申请量为0、近些年专利申请量逐年递增的,可以判断为是新兴技术。近些年的新兴技术有B23P、B05B、B65B、B05C、B07C。
表6 中国IPC小类年份分布
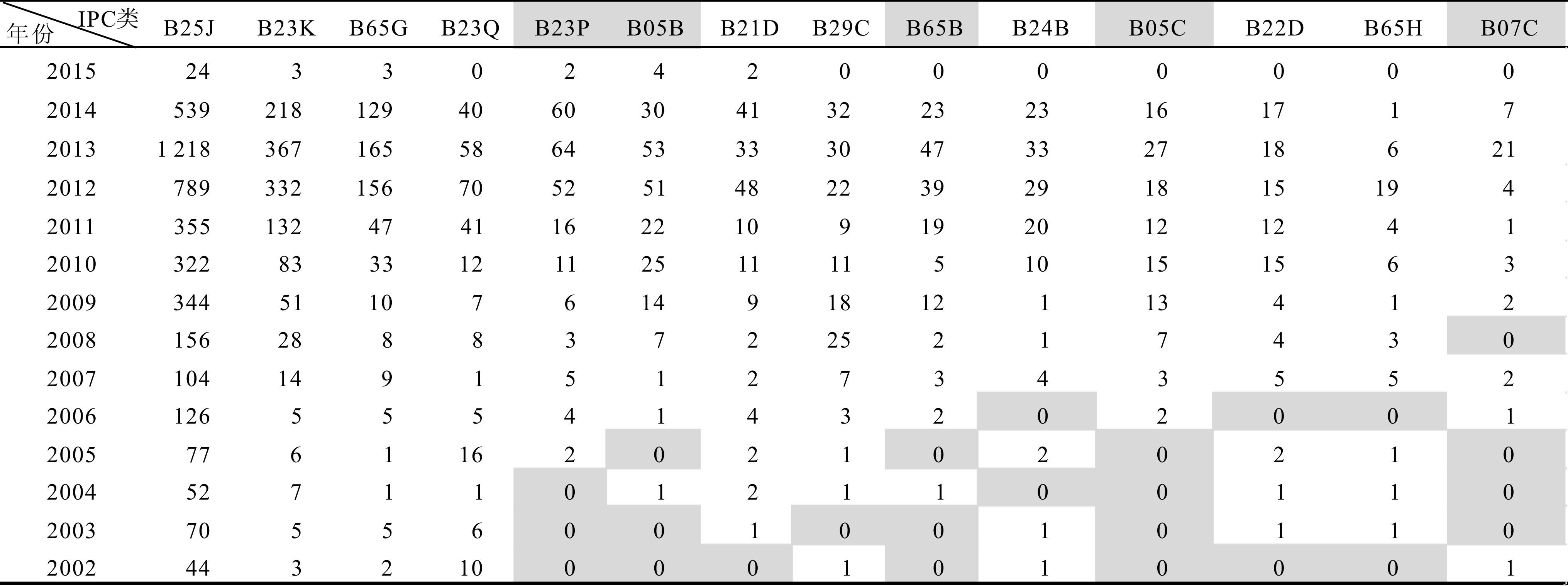
总体来看,中国的技术分布不均,大量技术集中在少量的IPC分类号断段。虽然有些IPC小类专利申请量小,但是呈缓慢增长态势,说明中国在近些年已经实现小范围的技术突破且有持续增长趋势。
3.4 专利应用领域识别
中国排名前15位的德温特分类号组合见表7,其分类号组合量占总量的48.17%。排名第一的分类号组合P62的数量为1 448,排名第15的组合P62、V06、X25的分布量仅为54。排名第一的分类号组合是P62(手持工具-切割),系单独组合,占总量的20.93%,其次是P62(手持工具-切割)与X25(工业电气设备)组合,占总量的5.72%,其余占比均不足5%。若单独看每一个分类号,P62(手持工具-切割)占据绝对优势。前15位排名中,P62(手持工具-切割)的频数占前15位总量的43.89%,其次是X25(工业电气设备),占15.33%,第三位的是P55(金属焊接),占7.5%,第三位及以后的分类号占比较小,均不足10%。前15位组合中,5组分类号为单分类号组合,分别是P62(手持工具-切割)、P52(工业电气设备)、P56(机床)、P42(喷涂,雾化)、Q35(垃圾收集,传送带),说明其技术应用领域较单一,单分类号组合占总量的29.4%;另外,两种分类号组合的有4组,三种分类号组合的有4组,四种分类号组合的有2组。中国工业机器人专利技术应用集中在少数方向上,除此之外,专利数量较少,说明未来工业机器人有较大的应用扩张空间。
4.1 专利技术生命周期预测
进行工业机器人专利技术周期预测的基础数据是每年的专利申请量,依此计算出每一年专利申请累计量,作为因变量,年份为自变量,用Matlab软件对各年累计量作Logistic模型回归,得出S曲线方程。技术周期预测分为两类:一是世界总体范围内的技术周期预测,二是单独将中国作为考虑对象进行预测。
4.1.1 世界范围内工业机器人专利技术生命周期预测
根据世界范围内专利申请量年份分布作回归,得出Logistic模型曲线,即技术周期预测趋势图。根据回归曲线的斜率变化,可将技术周期分为4个阶段(见表8):①1980年之前,每年全球的专利申请数量很少且发展缓慢,每年增加的数量不过几十件,因此这个阶段为技术发展萌芽期,即技术引入期;②1980-2017年,专利申请数量处于激增阶段且增长速度越来越快,是技术快速发展期;③2017-2030年,专利申请量有增长但增长速度减缓,说明技术逐渐走向成熟期;④2030年后,专利申请量处于饱和状态,增长率近乎为零,处于专利技术生命周期的衰落期。
4.1.2 中国工业机器人产业专利技术生命周期预测
根据中国工业机器人专利申请量的年份分布作回归,得出Logistic模型曲线,也即技术周期预测趋势图,进而根据模型曲线的斜率变化,得出中国工业机器人专利技术周期(见表9):①1984-2001年,每年申请的数量较少且存在部分年份零申请,截至2001年专利累计申请量为79件;②2001-2015年,进入专利数量的高速增长期,这一阶段平均年增长率为39%;③2015-2023年,增长速度减缓,但是仍然维持增长态势;④2023年之后,增长速度接近于0,进入专利技术衰落期。
表7 中国排名前15位分类号组合
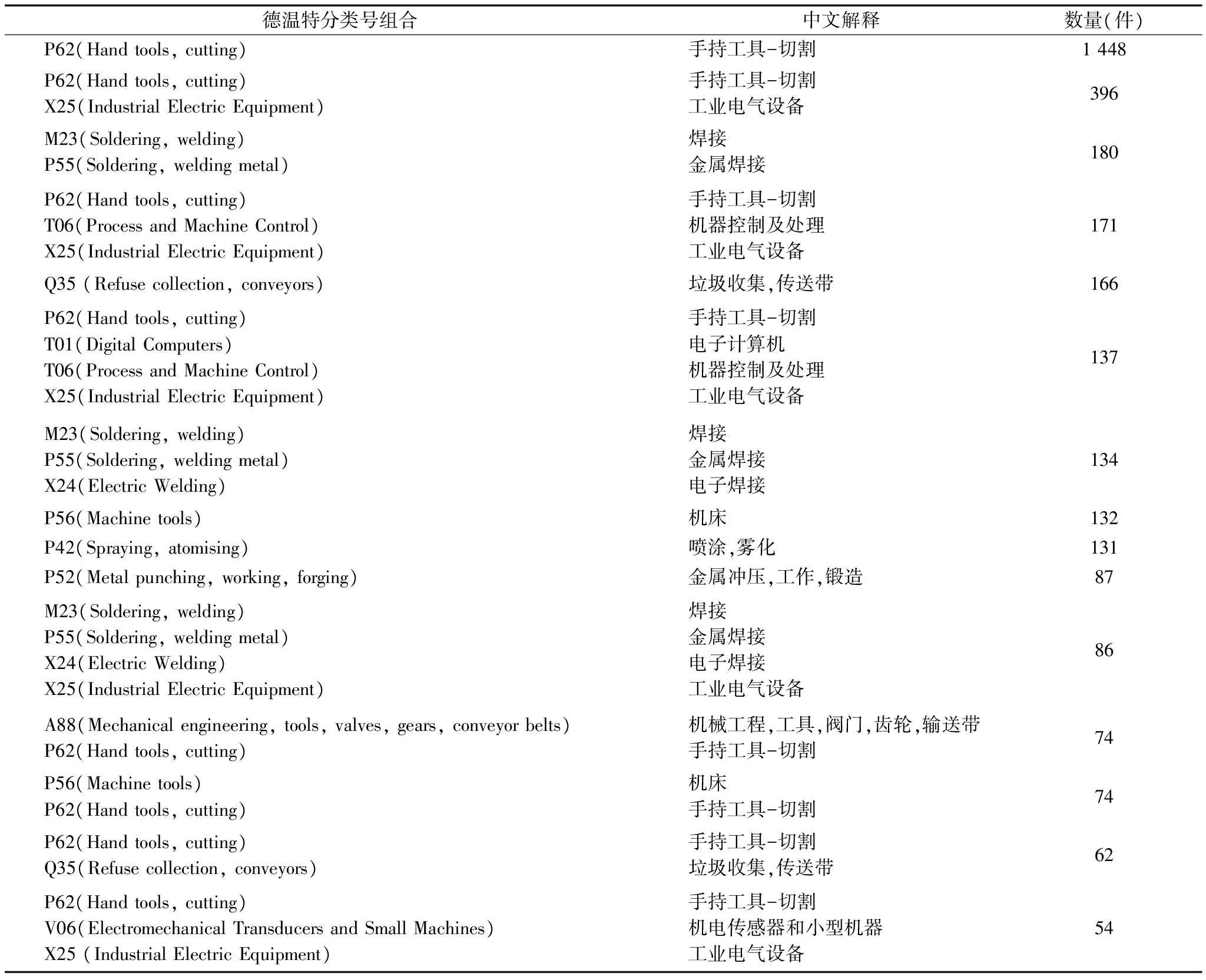
德温特分类号组合中文解释数量(件)P62(Handtools,cutting)手持工具-切割1448P62(Handtools,cutting)X25(IndustrialElectricEquipment)手持工具-切割工业电气设备396M23(Soldering,welding)P55(Soldering,weldingmetal)焊接金属焊接180P62(Handtools,cutting)T06(ProcessandMachineControl)X25(IndustrialElectricEquipment)手持工具-切割机器控制及处理工业电气设备171Q35(Refusecollection,conveyors)垃圾收集,传送带166P62(Handtools,cutting)T01(DigitalComputers)T06(ProcessandMachineControl)X25(IndustrialElectricEquipment)手持工具-切割电子计算机机器控制及处理工业电气设备137M23(Soldering,welding)P55(Soldering,weldingmetal)X24(ElectricWelding)焊接金属焊接电子焊接134P56(Machinetools)机床132P42(Spraying,atomising)喷涂,雾化131P52(Metalpunching,working,forging)金属冲压,工作,锻造87M23(Soldering,welding)P55(Soldering,weldingmetal)X24(ElectricWelding)X25(IndustrialElectricEquipment)焊接金属焊接电子焊接工业电气设备86A88(Mechanicalengineering,tools,valves,gears,conveyorbelts)P62(Handtools,cutting)机械工程,工具,阀门,齿轮,输送带手持工具-切割74P56(Machinetools)P62(Handtools,cutting)机床手持工具-切割74P62(Handtools,cutting)Q35(Refusecollection,conveyors)手持工具-切割垃圾收集,传送带62P62(Handtools,cutting)V06(ElectromechanicalTransducersandSmallMachines)X25(IndustrialElectricEquipment)手持工具-切割机电传感器和小型机器工业电气设备54
表8 世界专利技术生命周期的4个阶段
技术引入期技术发展期技术成熟期技术衰落期1963-1980年1980-2017年2017-2030年2030-
表9 中国专利技术生命周期的4个阶段
技术引入期技术发展期技术成熟期技术衰落期1984-2001年2001-2015年2015-2023年2023-
将中国与世界工业机器人专利技术周期趋势进行对比发现,两者周期的四阶段特征较明显,而且中国的专利技术周期从属于世界专利技术周期,部分阶段的时间存在重合。例如在技术发展期和成熟期,中国的专利技术发展都在世界发展期范围内。
两者差异也较明显:①由于中国工业机器人专利申请起步晚,当世界整体进入发展期时中国的工业机器人才刚起步;②世界整体的技术发展期经历的时间比中国要长20年左右,这是因为各国发展不同步,部分国家起步晚或发展较慢,影响世界整体的发展速度;③中国的成熟期较短,专利技术生命周期曲线在这一时间段的坡度远远陡于世界的,这与中国国情有关。近几年由于国家政策的支持和国内经济的快速发展,政策导向效应越来越强,研发投入越来越大,因此在2008年后专利申请量高速增长,2009-2013年的年增长率为99%,技术成熟速度快于世界平均速度;④中国的衰落期比世界进入得早。专利技术进入衰落期并不意味着技术落后,而是在专利申请量高速增长后,技术空白领域大大缩小,出现专利饱和现象,而此时也是工业机器人市场走向成熟的时期。
4.2 热点技术预测
若要对未来工业机器人热点技术进行预测,首先要确定预测的时间截点,其次是热点技术的判断。Citespace软件能根据现有专利文献作进一步文本挖掘:首先将专利文献中的关键词进行聚类分析,得出关键聚类,每一组聚类包含的文献按时间排列,再根据排列分别找出关键聚类的时间特征; 其次,利用Citespace的Citation Burst对突发性技术进行探测,找到突发技术。根据Citespace对突发性最强的前100件专利统计,突发技术被引用的时间跨度平均值为7.9年,本文将前100件专利按时间排序,考虑到时间太近会出现数据不完整情况,因此单独统计2001-2006年的突发技术数据,得出突发技术被引用的时间跨度为5.7年。因为本文数据库的时滞特征,2013年以后的专利文献不完整,因此以2010、2011、2012年为突发技术的基期,预测2018年的热点技术也即2025年实现社会化的工业机器人技术。
中国工业机器人技术成熟时间大约为2020年,技术从发明到走向市场化的时间跨度大约为7年,2025年可能实现市场化的技术是:CN102079089-A、CN202317409-U、US5161847-A、CN201855764-U、US5337732-A、CN203125529-U、JP2012187687-A、JP2014018850-A,掌握核心技术的机构仍然以跨国公司为主,不排除少量高校或者研究所。
(1)充分发挥高校、研究所的技术创新优势。中国高校和科研院所的研发水平与技术创新水平不断提高,是中国实施创新驱动战略、科技强国战略的领头羊。在全球兴起“工业4.0”的背景下,中国高校和科研院所应关注全球工业机器人技术热点,充分发挥其技术创新或者研发领头羊的作用,扬长避短,寻求技术突破,在局部范围内率先获得世界领先技术。
(2)推进高校、研究所与企业合作。企业与高校、研究所合作首先需要转变观念,从根本上认识两者合作优势所在,积极探寻合理、高效的合作途径。合作过程中,应以双方共同利益为出发点,为高校、研究所的技术创新与企业的进一步发展提供良好的开端。政府应以法规条例的形式鼓励高校、研究所把更多精力投入到应用研究、技术开发、成果转化上来,大力促进科技成果产业化和知识资本化,同时,综合运用多种经济鼓励政策。
(3)重视技术生命周期。技术有其自身的生命周期,政策制定中应该充分考虑到技术的周期性特征。国内现行的许多科技和创新规划常以5年为一个周期。从国际经验看,许多领域的规划,如欧盟支撑创新欧盟建设的旗舰行动地平线计划(Horizon 2020)以7年为一个周期。虽然无研究表明7年规划期是基于本文所讨论的、符合从技术可行到社会实现的时间规律,但是从规划编制与实施过程来看,编制本身需要1~2年时间,如果以5年为周期,那么还没有充分实施就已进入到下一个规划期。因此,是否需要将中国的科技规划和评估周期适度延长,并考虑不同领域和技术类型的差异性[13]是值得思考的。
(4)加强对大型企业技术创新的引导。重大技术突破或偏基础性研究主要依赖大公司,一方面是它们更有实力,另一方面是容易被市场接受,能承担长期投资的成本和风险。因而,重要技术突破的支持对象也应该是大公司[13]。提高企业技术创新能力,对大型企业的引导必不可少。不仅要建立政策导向,鼓励大型企业技术创新,而且要引导企业树立专利布局意识,在未来经济活动中创造更好的经济效益和社会效益。
参考文献:
[1] CONIGLIARO L.Trends in the robot industry (revisited):where are we now[C].Proceedings of the 13th International Symposium on Industrial Robots and Robots,1983.
[2] WHITNEY D E,LOZINSKI C A,ROURKE J M. Industrial robot forward calibration method and results[J]. Journal of Dynamic Systems,Measurement,and Control,1986,108(1):1-8.
[3] ASADA M,ISHIGURO S. Next generation robot industry in Japan & Osaka[C].Biorobotics Workshop,Egypt,2010:13-15.
[4] 许玲玲.运用专利分析进行竞争对手跟踪[J].情报科学,2005,23(8):1271-1276.
[5] 杨薇炯.专利地图与企业专利战略关联及其在专利战略中的作用研究[J].情报理论与实践,2010(1):55-58.
[6] 王珊珊,田金信.基于专利地图的R&D联盟专利战略制定方法研究[J].科学学研究,2010,28(6):846-852.
[7] 宓翠,袁旭梅,孟卫东.基于专利地图技术的我国风电产业专利竞争情报研究[J].情报杂志,2010,29(11):39-43.
[8] 潘雄锋,张维维,舒涛.我国新能源领域专利地图研究[J].中国科技论坛,2010(4):41-45.
[9] 王磊.基于专利地图的太阳能产业专利现状与技术研究[J].合肥工业大学学报:自然科学版,2011,34(5):771-776.
[10] 顾震宇,路炜,肖沪卫.燃料电池机动车辆专利地图研究[J].汽车工程,2010(2):173-178.
[11] YOON B U,YOON C B,PARK Y T.On the development and application of a self-organizing feature map-based patent map[J].R&D Management,2002,32(4):291-300.
[12] 中国航天科工集团知识产权研究中心.工业机器人技术全球专利布局现状及启示[EB/OL].2015[2016.02.21].http://www.nipso.cn/onews.asp?id=26806.
[13] 周娟,彭莉,乔为国.技术可行到社会实现的时间跨度——基于日本第9次科技预见的研究[J].中国科技论坛,2015(12):143-148.
(责任编辑:胡俊健)
The Industrial Technology Research of Industrial Robot of China——Based on the Perspective of Patent Map
Abstract:In this paper, from the entry point of industrial robot industry, we excavated and retrieved industrial robot patent data by the use of TDA, Matlab software with a search range of Derwent patent database, then depicted a comprehensive and detailed industrial robot industry patent map of China. The Map had a comprehensive analysis of industrial robots of China in terms of patent application year, agencies, state of the art distribution, patented technology cycle and the differences compared with the world cycle, to provide reliable industry technology intelligence for industrial robot patent portfolio of China.
Key Words:Industrial Robots; Patent Map; Patented Technology; Life Cycle
收稿日期:2016-10-10
基金项目:国家自然科学
基金项目(71541028,71573113);教育部重大项目(14JZD018);辽宁省软科学计划项目(2013401032)
DOI:10.6049/kjjbydc.2016060394
中图分类号:F426.67
文献标识码:A
文章编号:1001-7348(2017)07-0055-07